Chapter 6 Motion Function Blocks
(10) Application example program
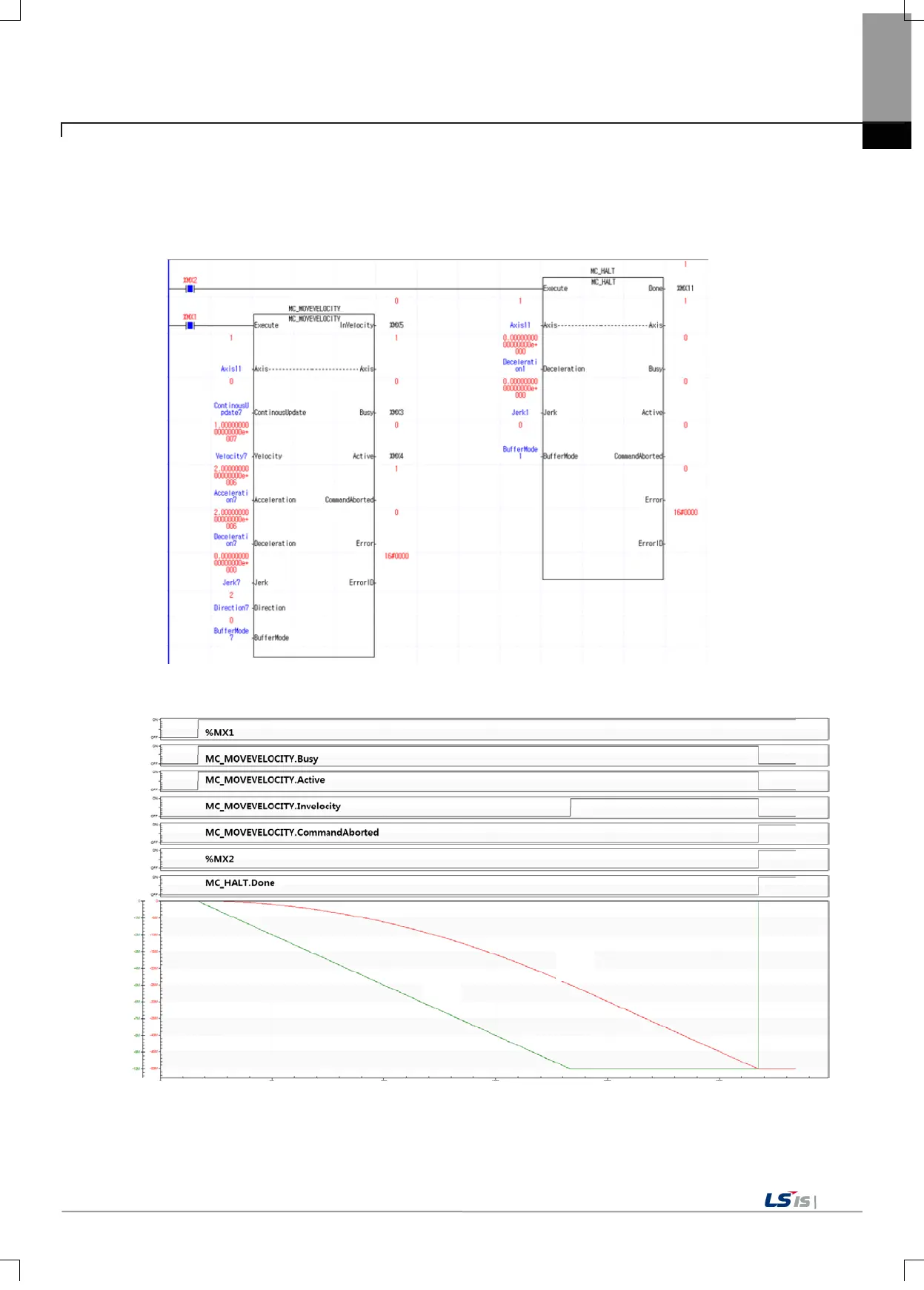
This example program shows that it stops running due to the execution of MC-Halt function block, while moving in the
reverse direction at a velocity of 10,000,000.
(a) Function block setting
(b) Timing diagram

 Loading...
Loading...
