Chapter 8 Motion Control Function
6. Helical interpolation
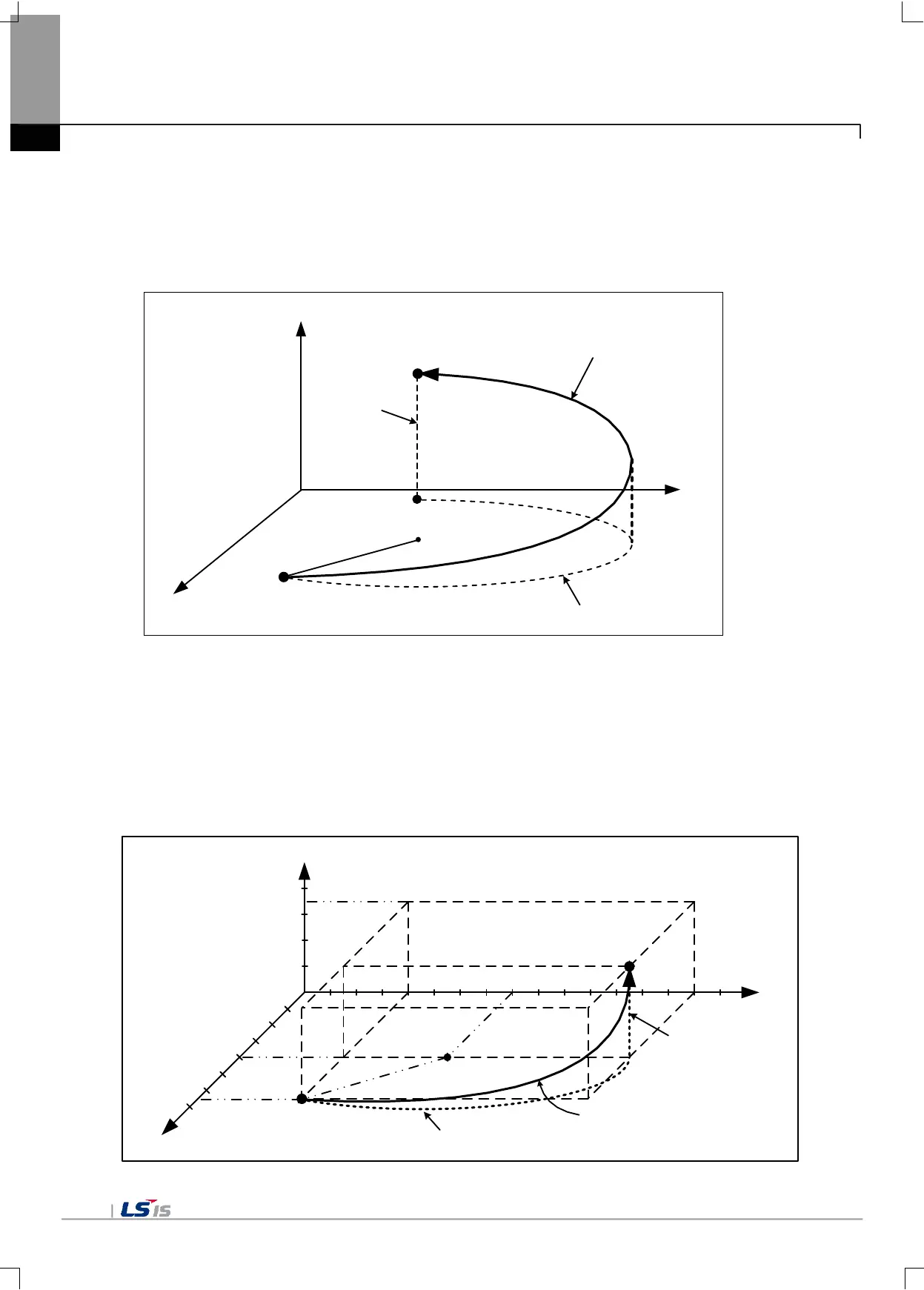
(1) When circular interpolation commands (absolute position coordinate system circular interpolation operation (MC_
MoveCircularAbsolute2D), relative position coordinate system circular interpolation operation (MC_MoveCircularRelati
ve2D)) are executed, circular interpolation is performed by moving in a circular trajectory on the XY plane, while li
near interpolation synchronized to the circular interpolation motion is performed with respect to Z-axis
(2) To perform helical interpolation, set the target position for linear interpolation at Pz of ‘EndPoint’.
Z axis
X axis
Y axis
Linear interpolation
line
Center point
Start point
(x1, y1, z1)
Circular interpolation
line
Helical interpolation
operation
Target point
(x2, y2, z2)
(3) Limitation
The restrictions for the circular interpolation mode designated for helical interpolation also apply to the helical interpolation.
(4) Operation pattern
- Start point: (65.0, 40.0, 0.0)
- Target point: (40.0, 120.0, 35.0)
- Center point: (40.0, 80.0, 0.0)
- CircMode: Center point(1)
- PathChoice: - CCW(1)
Z axis
Xaxis
Y axis
Linear
interpolation line
Center point
(40,80,0)
Start point
(65,40,0)
Circular
interpolation line
Circular interpolation
operation
Target point
(40,120,35)
70
40
8010 12040
30
0
60
40

 Loading...
Loading...
