Chapter 8 Motion Control Function
(2) Conveyor belt synchronized setting disable(PCS setting)
MC_SetCartesianTransform
DoneExecute
AxesGroup AxesGroup
BOOL
BOOL
UINT UINT
LREAL TransX
LREAL TransY
Busy BOOL
CommandAborted BOOL
Error BOOL
ErrorID WORD
Active BOOL
LREAL TransZ
LREAL RotAngleA
LREAL RotAngleB
LREAL RotAngleC
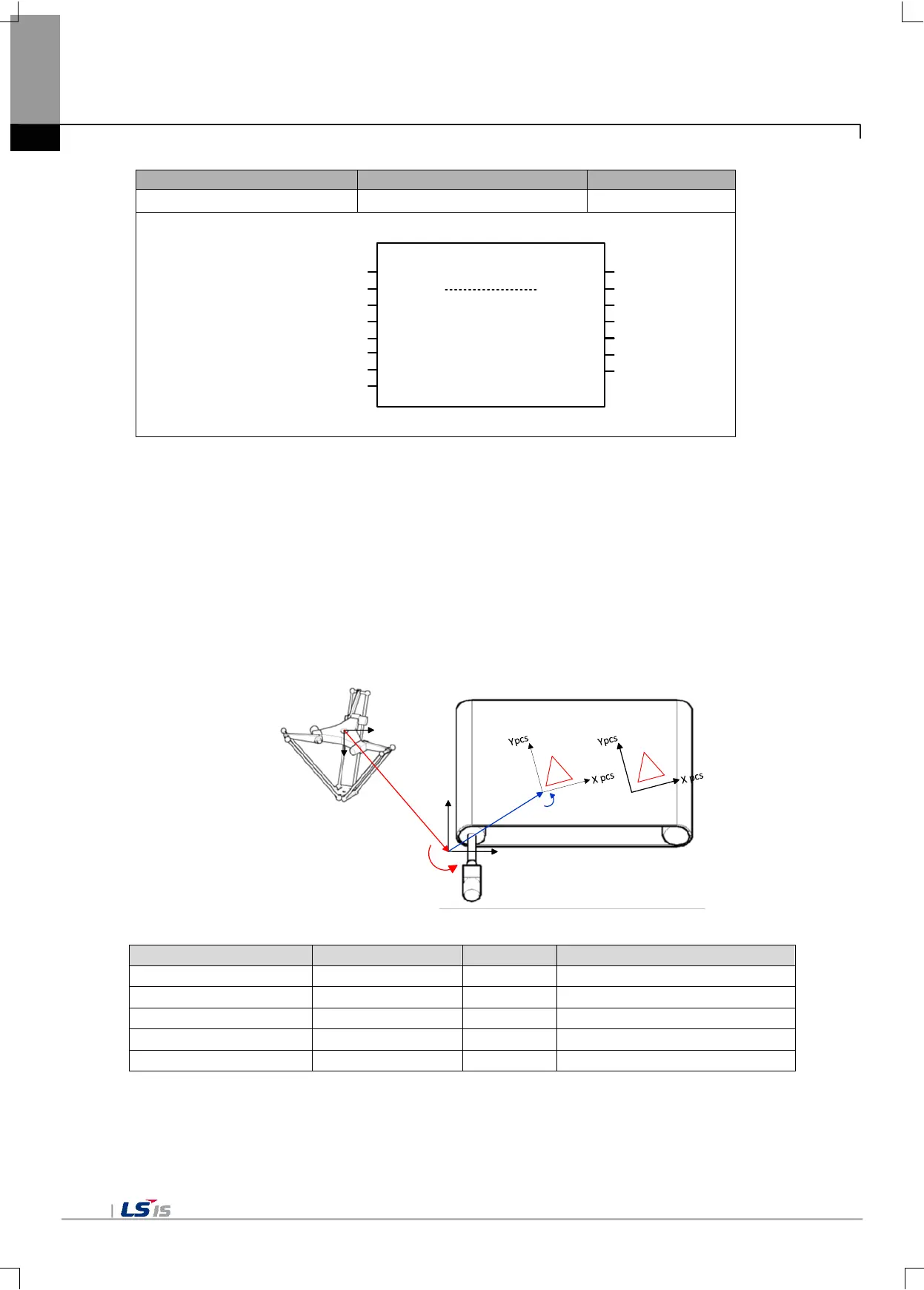
(3) Conveyor belt synchronized function operation example
The conveyor belt synchronization function begins with setting conveyor synchronization using MC_TrackConveyorBelt
function block. For MC_TrackConveyorBelt function block, enter conveyor axis value at the ConveyorAxis input, enter
the conveyor belt position from the robot's origin point at the ConveyorAxis input, and enter the position of the product
origin point from the conveyor origin point at the ConveyorOrigin input. Once MC_TrackConveyorBelt function block
setting is complete, LS_MoveLinearTimeAbsolute function block where the subsequently applied CoordSystem input is
set to PCS is operated in sync with the conveyor. Synchronized conveyor operation performs an operation of drawing a
triangle on a product. After synchronized conveyor belt operation is completed, execute LS_MoveLinearTimeAbsolute
function block where the CoordSystem is set to MCS to return to the previous status where the conveyor work is not yet
performed.
ConveyorAxis
Xconveyor
Yconveyor
Trans[conveyororigin]
Trans[objectposition]
Y mcs
X mcs
Rot[ConveyorOrgin]
Rot[objectposition]
InitTCP(-240,0,-380)
Move the robot to its initial position

 Loading...
Loading...
