12.7 H: TERMINALS
572 SIEPCYEUOQ2V01A Q2V Technical Manual
■ 7: Jog Forward
Setting Value Function Description
7 Jog Forward
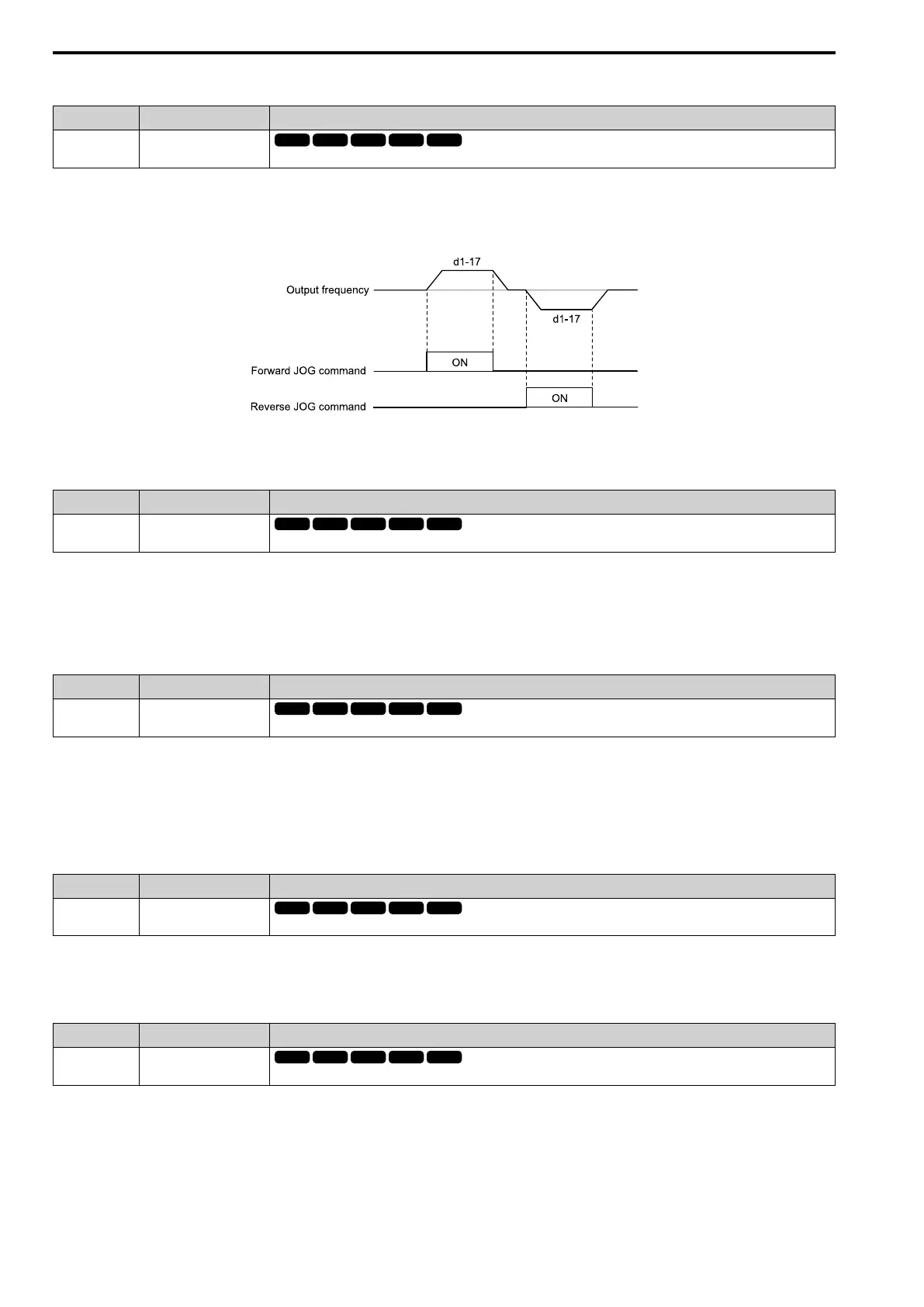
Sets the command to operate the motor in the forward direction at the Jog Frequency set in d1-17 [Jog Reference].
Note:
• It is not necessary to input the Run command.
• The Forward JOG command has priority over all other frequency references.
• When the Forward JOG and Reverse JOG commands are activated at the same time for 500 ms or longer, the drive will ramp to stop.
Figure 12.67 JOG Operation Pattern
■ 8: Jog Reverse
Setting Value Function Description
8 Jog Reverse
Sets the command to operate the motor in reverse at the Jog Frequency set in d1-17 [Jog Reference].
Note:
• It is not necessary to input the Run command.
• The Reverse JOG command has priority over all other frequency references.
• When the Forward JOG and Reverse JOG commands are activated at the same time for 500 ms or longer, the drive will ramp to stop.
■ 9: Ext Ref 1/2
Setting Value Function Description
9 Ext Ref 1/2
Sets the drive to use Run command source 1/2 or Reference command source 1/2 when in REMOTE Mode.
Note:
When the drive is receiving a Run command, you cannot switch between reference sources.
ON : b1-15 [Freq. Ref. Sel. 2], b1-16 [Run Comm. Sel 2]
OFF : b1-01 [Freq. Ref. Sel. 1], b1-02 [Run Comm. Sel 1]
■ A: MultSpd Ref1
Setting Value Function Description
A MultSpd Ref1
Uses speed references d1-01 to d1-16 to set a multi-step speed reference.
Note:
Refer to “Setting Procedures for Multi-step Speed Operation” in “d: REFERENCE on page 508” for more information.
■ B: MultSpd Ref2
Setting Value Function Description
B MultSpd Ref2
Uses speed references d1-01 to d1-16 to set a multi-step speed reference.
Note:
Refer to “Setting Procedures for Multi-step Speed Operation” in “d: REFERENCE on page 508” for more information.

 Loading...
Loading...










