Parameter Details
12
12.9 n: SPECIAL
SIEPCYEUOQ2V01A Q2V Technical Manual 677
• If torque is not sufficient with a heavy load or if you must increase torque or speed responsiveness, decrease the
setting value in 10 ms increments and examine the response.
Note:
• Set n2-02 ≤ n2-03 [AFR Time 1 ≤ AFR Time 2]. If n2-02 > n2-03, the drive will detect oPE08 [Parameter Selection Error].
• When you change the value in n2-02, also change the value in C4-02 [Trq Comp Delay Time] by the same ratio.
■ n2-03: AFR Time 2
No.
(Hex.)
Name Description
Default
(Range)
n2-03
(0586)
AFR Time 2
Sets the time constant that sets the speed difference of the AFR function. Use this parameter for
speed searches or regeneration. Usually it is not necessary to change this setting.
750 ms
(0 - 2000 ms)
Adjust this parameter in these conditions:
• If the drive detects ov [Overvoltage] when acceleration stops under high-inertia loads, increase the setting value
in 50 ms increments.
If the drive detects ov when the load changes suddenly, increase the setting value in 50 ms increments.
• To increase the responsiveness of torque and speed, decrease the setting value in 10 ms increments and examine
the response.
Note:
• Set n2-02 ≤ n2-03 [AFR Time 1 ≤ AFR Time 2]. If n2-02 > n2-03, the drive will detect oPE08 [Parameter Selection Error].
• When you change the value in n2-03, also change the value in C4-06 [M2 Trq Comp Delay Time] by the same ratio.
◆ n3: HIGHSLIP/OVEREXCITATION BRAKE
n3 parameters configure High Slip Braking and Overexcitation Deceleration.
■ High Slip Braking (HSB)
High slip braking quickly decelerates motors without braking resistors.
This lets you stop a motor more quickly than with the ramp to stop processes. This function is best for
applications that do not frequently stop the motor, for example the fast stop function for high-inertia loads.
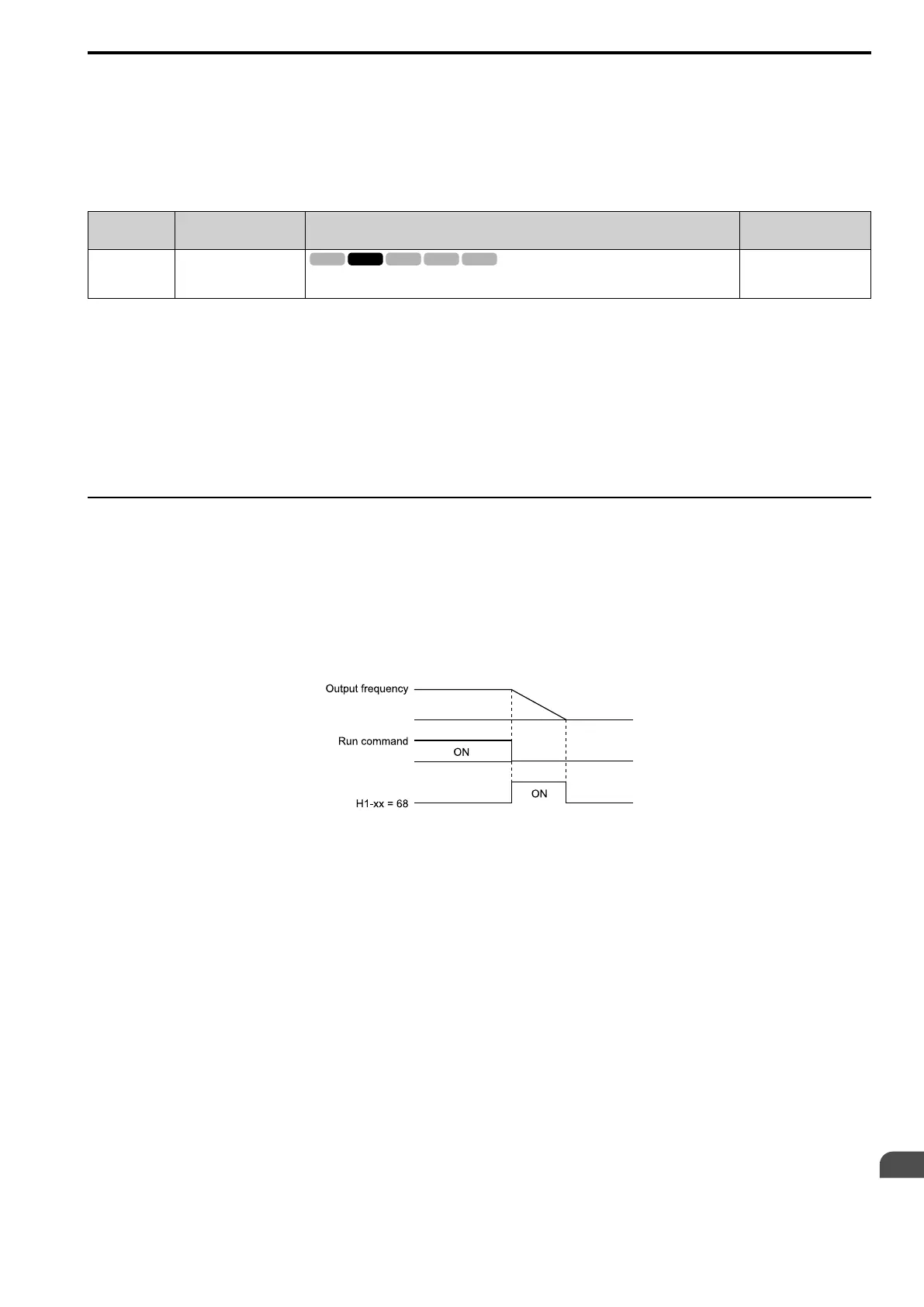
Braking starts when the MFDI for HiSlipBraking [H1-xx = 32] activates.
Figure 12.129 High Slip Braking Time Chart
An induction motor is necessary to use high slip braking. Set A1-02 = 0 [Control Method = V/f Control] to enable
high slip braking:
Principles of Operation
HSB increases motor slip by significantly decreasing the frequency supplied to the motor at the same time that
deceleration starts. A large quantity of current flows through the motor to increase the motor loss, and the motor
decelerates while the motor windings consume the regenerative energy.
The drive keeps the motor current at a constant level during deceleration to prevent overvoltage and do automatic
braking and it also keeps a slip level that causes the maximum quantity of deceleration torque.
High Slip Braking Precautions
• Do not use the high slip braking function in these applications:
– Frequent deceleration
– Deceleration time differences
– Continuous regenerative loads
– It is necessary to accelerate again during deceleration

 Loading...
Loading...










