7 Advanced Settings
7 - 16
High-function General-purpose Inverter RX2 Series User’s Manual
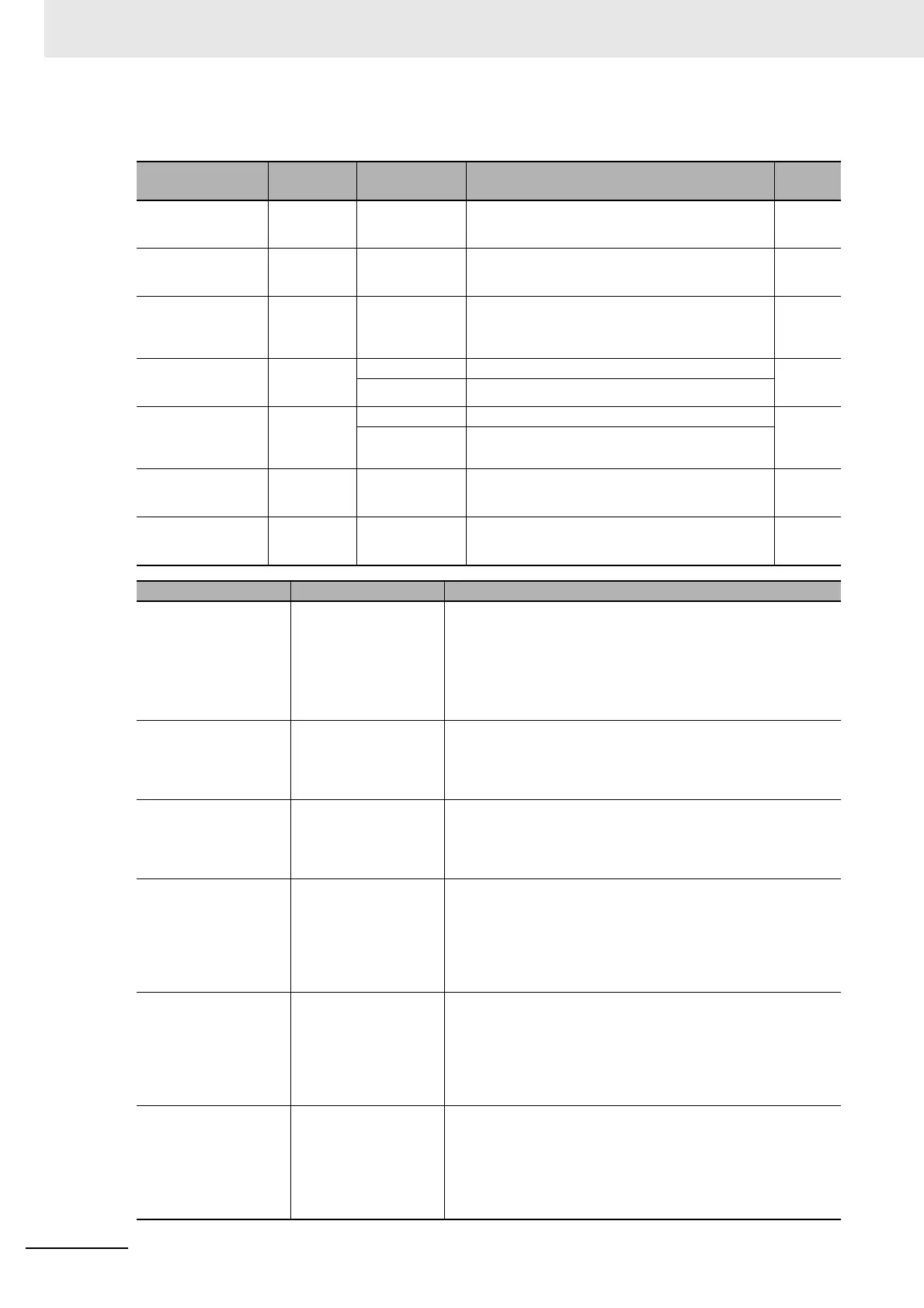
Parameter
Item Parameter Data Description
Default
data
Control mode
selection,
1st-motor
[AA121] 08 To use the sensorless vector control (IM). 00
Speed response
for Async.M,
1st-motor
[HA115] 0 to 1000(%)
To adjust the responsiveness of the control.
A larger value enhances the responsiveness.
100
Boost value at start
for
Async.M-SLV/IM-C
LV, 1st-motor
[HC111] 0 to 50(%)
To adjust the current command at the start when
the starting torque is not sufficient.
0
Secondary resis-
tance correction,
1st-motor
[HC113]
00 Disabled
00
01 Enabled Requiring a temperature thermistor.
Counter direction
run protection
selection,
1st-motor
[HC114]
00 Disabled
00
01
Enabled Limit the output to prevent the output in
the reverse direction.
Torque current ref-
erence filter time
constant, 1st-motor
[HC120] 0 to 100(ms) To adjust the filter for the torque current. 2
Speed feedfor-
ward compensa-
tion gain, 1st-motor
[HC121] 0 to 1000(%)
To adjust the feed forward control of the speed
controller.
0
Phenomenon Estimated cause(s) Exemplar measures to be taken
Socks occur during the
revolutions at the start.
The control system
has a speed response
that is too high.
• Make an adjustment by decrementing the response adjust-
ment [HA115] by 5% each time.
• Make an adjustment by decrementing the IM motor constant
J [Hb118] by 5% each time.
• Make an adjustment by decrementing the boost amount at
the start [HC111] by 5% each time.
Unsteady revolutions
at low speeds, result-
ing in fluctuating revo-
lutions.
The control system
has a speed response
that is too low.
• Make an adjustment by incrementing the response adjust-
ment [HA115] by 5% each time.
• Make an adjustment by incrementing the IM motor constant
J [Hb118] by 5% each time.
The motor is hunting.
The control system
has a speed response
that is too low.
• Make an adjustment by decrementing the response adjust-
ment [HA115] by 5% each time.
• Make an adjustment by decrementing the IM motor constant
J [Hb118] by 5% each time.
When a load in the
motor-stopping direc-
tion is applied to the
motor, the revolution
frequency becomes
lower.
The motor constant R2
is set at too small a
value.
Make an adjustment by incrementing the IM motor constant
R2 [Hb112] by 5% of the current value each time.
When a load in the
motor-stopping direc-
tion is applied to the
motor, the revolution
frequency becomes
higher.
The motor constant R2
is set at too large a
value.
Make an adjustment by decrementing the IM motor constant
R2 [Hb112] by 5% of the current value each time.
When a load in the
motor-stopping direc-
tion is applied to the
motor, the revolution
frequency becomes
higher.
Insufficient regenera-
tive torque at low
speeds.
• Make an adjustment by incrementing the IM motor constant
R1 [Hb110] by 5% of the current value each time.
• Make an adjustment by incrementing the IM motor constant
I0 [Hb116] by 5% of the current value each time.