7 - 53
7 Advanced Settings
High-function General-purpose Inverter RX2 Series User’s Manual
7-3 Torque Control
7
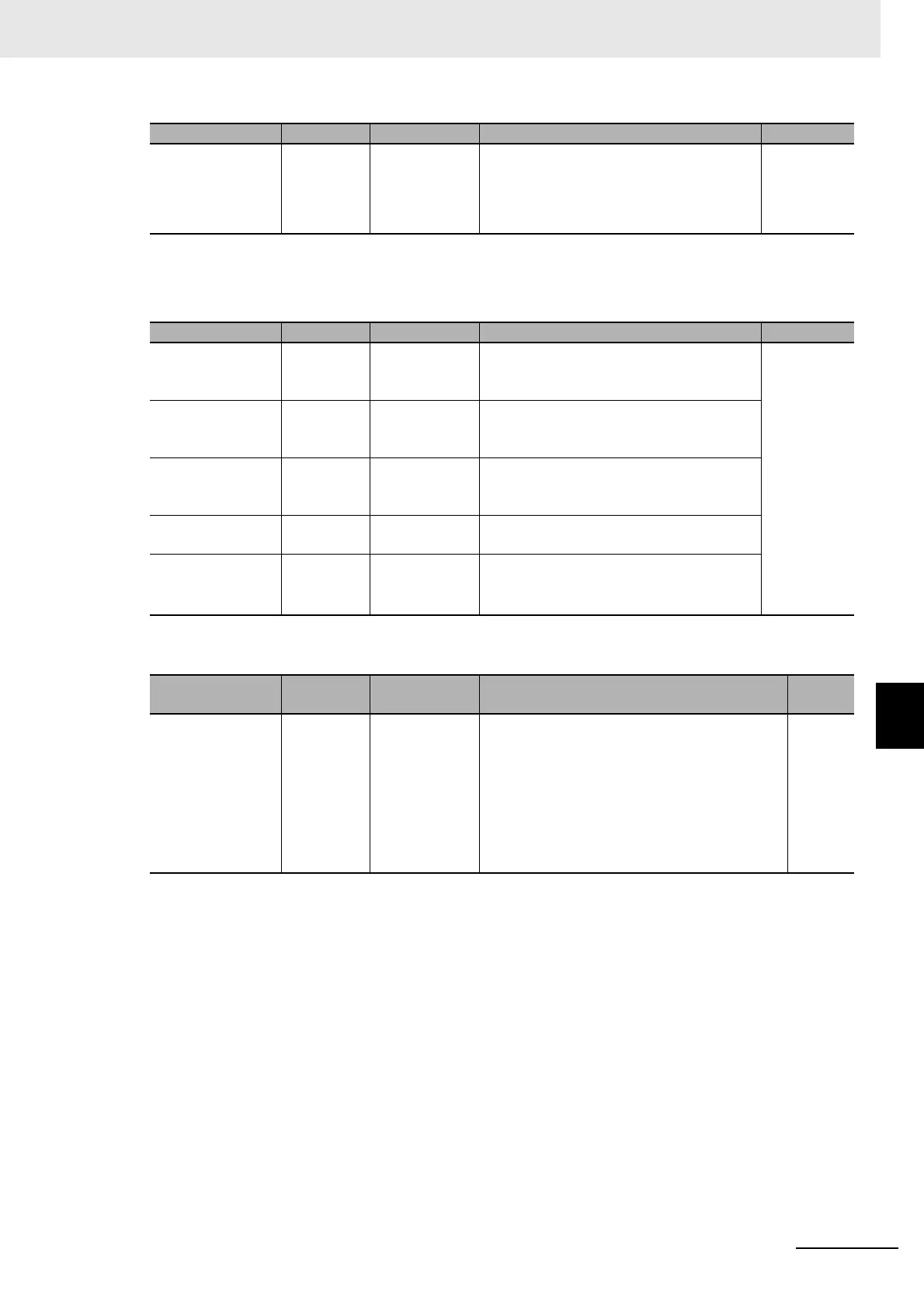
7-3-5 High-torque Multi-operation Control
IM Motor Constant Parameter
Parameter
Async.Motor rated
current, 1st-motor
[Hb108] 0.01 to
10000.00(A)
Sets a 2-fold rated current of a motor in
high torque multi-operation.
Varies
depending
on inverter
models and
settings of
duty rating.
*1. Default data when default data selection (UB-02) is set to 01.
Item Parameter Data Description Default data
Async.Motor con-
stant R1, 1st-motor
[Hb110] 0.000001 to
1000.000000
(Ω)
Sets half of primary resistance of a motor in
high torque multi-operation.
Varies
depending
on inverter
models and
settings of
duty rating.
Async.Motor con-
stant R2, 1st-motor
[Hb112] 0.000001 to
1000.000000
(Ω)
Sets half of secondary resistance of a motor
in high torque multi-operation.
Async.Motor con-
stant L, 1st-motor
[Hb114] 0.000001 to
1000.000000
(mH)
Sets half of leaked inductance value of a
motor in high torque multi-operation.
Async.Motor con-
stant Io, 1st-motor
[Hb116] 0.01 to
10000.00(A)
Sets a 2-fold non-load current value of a
motor in high torque multi-operation.
Async.Motor con-
stant J, 1st-motor
[Hb118] 0.00001 to
10000.00000
(kgm
2
)
Sets a 2-fold system inertia moment of a
motor in high torque multi-operation.
Item Parameter Data Description
Default
data
Control mode
selection,
1st-motor
[AA121]
08: Sensorless
vector con-
trol (IM)
09: Sensorless
vector con-
trol in zero
speed area
(IM)
*1
*1. Cannot be selected if [Ub-03] duty spec selection is 01 (LD) or 00 (VLD).
Uses the sensorless vector control function or
sensorless vector control in the zero speed
area.
00
Item Parameter Data Description Default data

 Loading...
Loading...










