8 - 5
8 Applied Settings
High-function General-purpose Inverter RX2 Series User’s Manual
8-1 PID Control
8
8-1-1 Function Overview
Precautions for Correct Use
• In the case of controlling the motor by PID control, frequency command destination needs to
be set to PID output.
• The upper/lower limiter function operates for command frequency by PID output. It does not
operate for PID target value.
e.g.) Follow the steps below to perform simple PID control by inputting a target value [Ai1] and a feed-
back (FB) value [Ai2] from where parameters are default.
1. Set [AH-01] to 01 (enable)
2. Set 15 (PID calculation) to the main speed input source selection, 1st-motor [AA101]
3. Set 01 (Ai1) to the PID1 target value 1 input destination [AH-51]
4. Set 02 (Ai2) to the PID1 FB 1 input destination [AH-07]
5. Set the PID gain of PID1 to [AH-61] to [AH-63]
6. Put the run-command input source selection, 1st-motor [AA111] and start PID control
This section explains of a situation when PID target value is constant and feedback (FB) value is
changed by using an example.
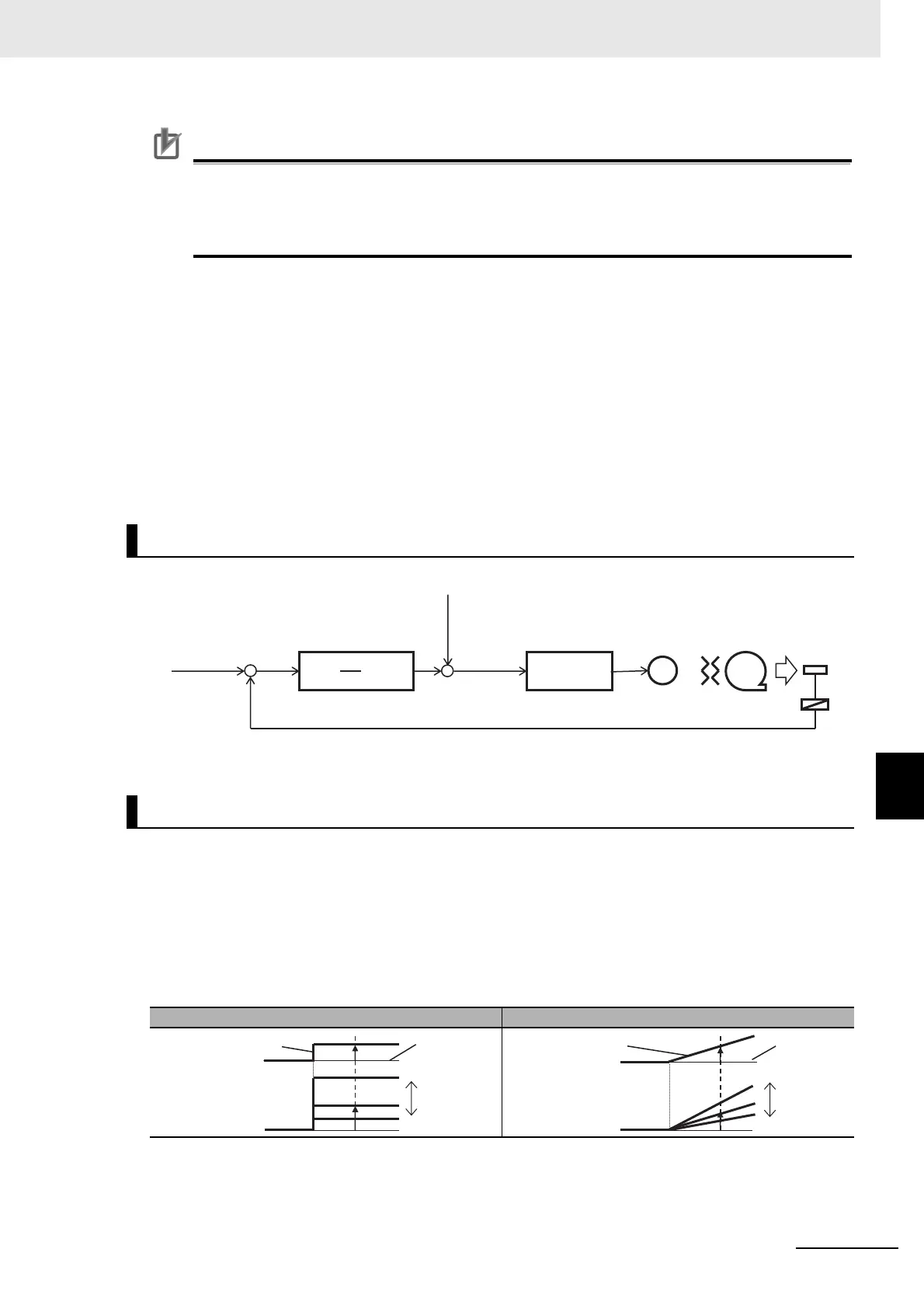
(a) P operation: P gain Kp
This is an operation that an operation amount of PID command value is proportional to the devia-
tion between PID target value and current feedback (FB) value.
Command operation amount can be adjusted by P gain.
Deviation becomes (PID target value - FB value).
Basic Composition of PID Control
PID Operation
When the target value increases stepwise When the target value increases linearly (ramp)
0 to 10V
4 to 20mA
fs
M
=
4 to 20mA
+
-
Kp (1+ + Td∙S)
1
Ti∙S
+
+
0 to 10V
4 to 20mA
-10 to 10V
Target
value
Operation
amount
Transducer
Inverter
Normal control
Deviation ε
PID calculation
DisableFeed-forward
Sensor
Kp: Proportional gain Ti: Integral time Td: Differential time s: Operator ε: Deviation
Ki: Integral gain setting (Ki=Ti/Kp) Kd: Differential gain setting (Kd=Kp×Td)
Feedback 0 to 10V
PID target value
FB value
Operation amount
Large
Small
P gain
PID target value
FB value
Operation amount
Large
Small
P gain
 Loading...
Loading...











