8 - 103
8 Applied Settings
High-function General-purpose Inverter RX2 Series User’s Manual
8-4 Control Function
8
8-4-7 Pulse Train Position Control
<Setting Examples>
• Main motor: Number of encoder pulses is 1024
• Sub motor: Number of encoder pulses is 3000
• Main motor rotation speed : sub motor rotation speed =2 : 1
For the operation with the above conditions, set the following data to the slave unit.
[ob-11] Pulse train input mode selection : 00
[AE-01] Electronic gear installation position : 01 (REF)
[AE-02]Electronic gear ratio numerator : 3000
[AE-03]Electronic gear ratio denominator : 1024 × 2 = 2048
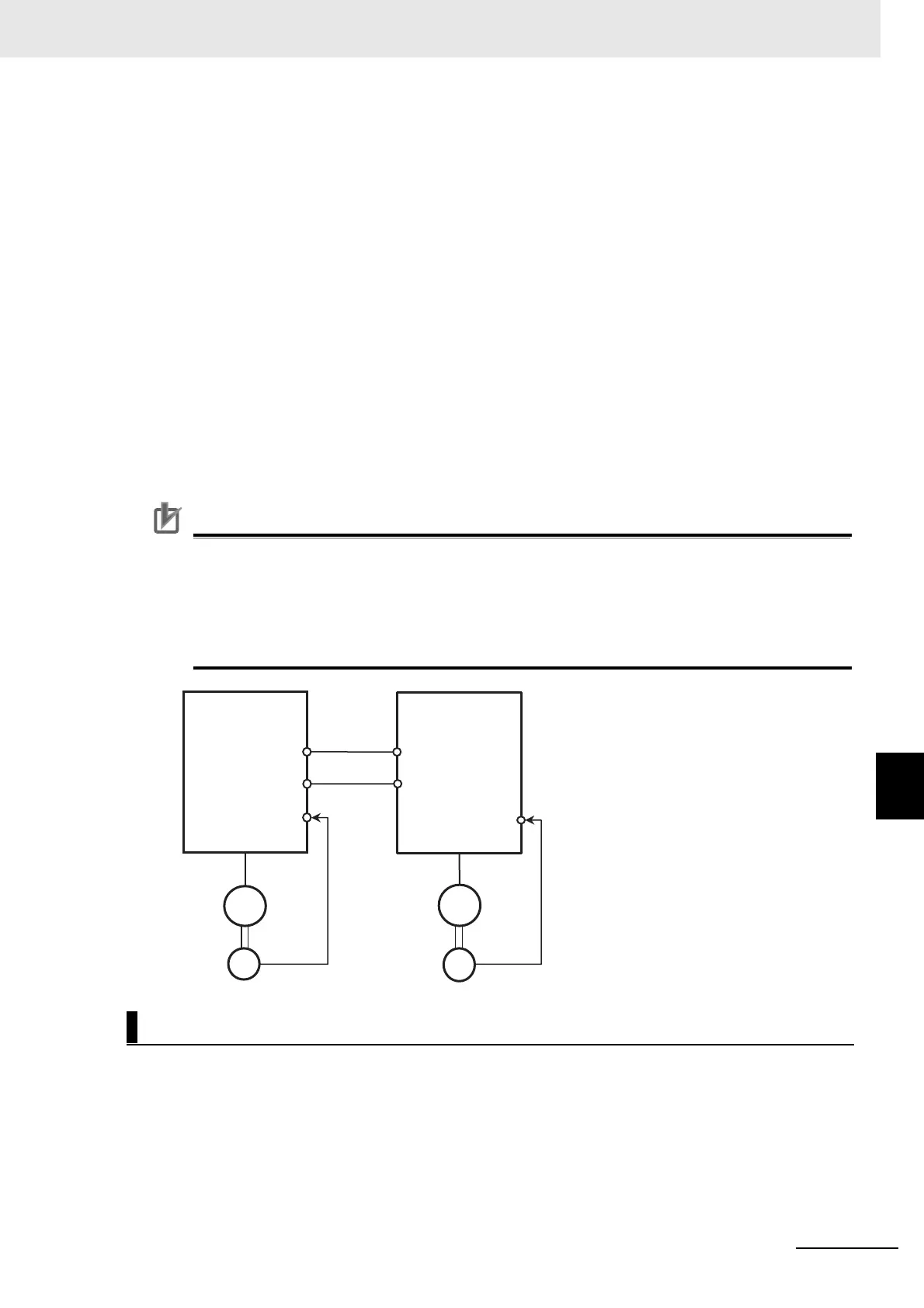
The encoder output [AP][BP][AN][BN] of the main motor is retrieved as the pulse train position com-
mand [SAP][SBP][SAN] [SBN] of the slave unit.
When the main motor speed is high, the change amount of the pulse per unit time is getting large and
the speed command of the slave unit is also getting large. •When the main motor speed is low, the
speed command of the slave unit is also getting small.
This causes the sub motor follows the main motor to operate.
Precautions for Correct Use
• It is recommended to start position control feedforward gain adjustment with AE-06 set to
2.00. To reduce the position deviation between the main and sub motors, increase the feed-
forward gain. If motor hunting occurs, reduce the feedforward gain.
• It is recommended to start position loop gain adjustment with AE-07 set to 2.00. To increase
the positioning accuracy and the holding power, increase the position loop gain. If the posi-
tion loop gain is set too high and causes hunting, decrease the position loop gain.
Used to apply a bias to the position command for the pulse train position control.
Add/subtract the set number of pulses to the change amount every 1 ms. Used to adjust the phase of
the synchronization point during the synchronous operation, etc.
Set the bias amount to the [AE-08] position bias amount.
Assign either 074(PUP) or 075(PDN) of the input terminal function.
The bias amount is added while the PUP terminal is on and is subtracted while the PDN terminal is on.
Position Bias Function
SAN,SBN
<Master unit> <Slave unit>
Main
Motor
Sub
Motor