8 Applied Settings
8 - 106
High-function General-purpose Inverter RX2 Series User’s Manual
(4) When the [AE-05] positioning completion delay time passes after the remaining number of pulses
enters the [AE-04] positioning completion range setting, the [POK] signal is output.
(The output continues until the ORT terminal is turned off.)
After the positioning completes, the servo lock status continues until the operation command is
turned off.
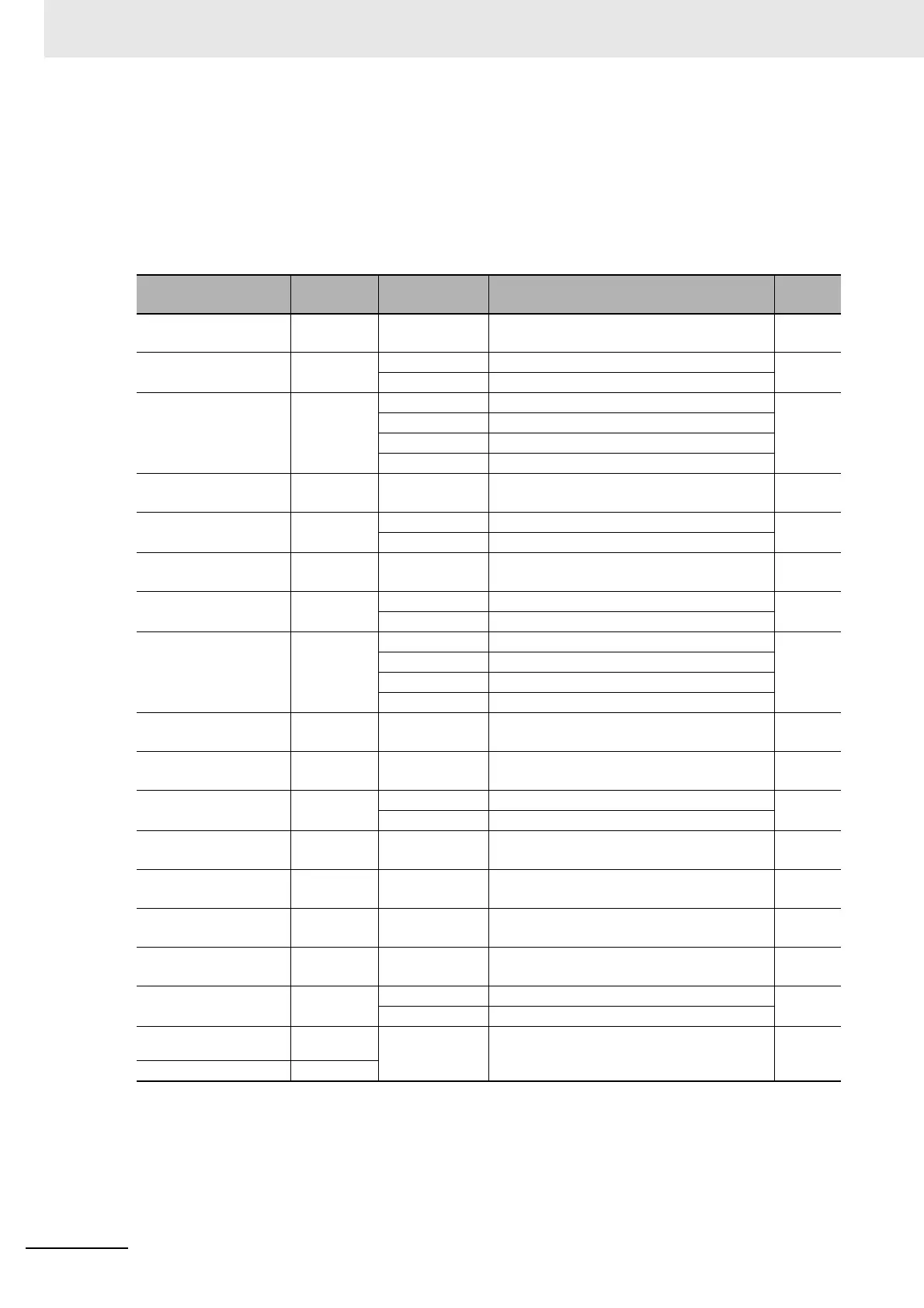
Parameter
Item
Function
Code
Data/
Data Range
Description
Default
data
Control mode
selection, 1st-motor
[AA121] 10 Vector control with sensor 00
Vector control mode
selection, 1st-motor
[AA123]
00 Speed/Torque control mode
00
01 Pulse train position control mode
Pulse train detection
object selection
[CA-90]
00 Disabled
00
01 Pulse train frequency command
02 Speed feedback
03 Pulse count
Encoder constant set-
ting
[CA-81] 32 to 65535 Setting of the number of pulses. 1024
Encoder position
selection
[CA-82]
00 A phase precedes
00
01 B phase precedes
Encoder constant set-
ting
[ob-01] 32 to 65535 Setting of the number of pulses. 1024
Encoder position
selection
[ob-02]
00 A phase precedes
00
01 B phase precedes
Stop position selection
of Home search func-
tion
[AE-10]
00 Parameter setting
00
01 Option 1
02 Option 2
03 Option 3
Stop position of Home
search function
[AE-11] 0 to 4095 Note 2) 0
Speed reference of
Home search function
[AE-12]
0.00 to
120.00(Hz)
Note 1) 0.00
Direction of Home
search function
[AE-13]
00 Forward rotation
00
01 Reverse rotation
Positioning complete
range setting
[AE-04] 0 to 10000(pls)
Set the value equivalent to encoder 4 multi-
plication
5
Positioning complete
delay time setting
[AE-05] 0.00 to 10.00(s)
Set the time from the positioning completion
to the output of the [POK] signal.
0.00
Position feed-forward
gain setting
[AE-06] 0 to 655.35 Position feed forward gain. 0.00
Position loop gain set-
ting
[AE-07]
0.00 to
100.00(rad/s)
Position loop gain. 0.50
Input terminal
[CA-01] to
[CA-11]
069 ORT: Orientation
-
109 PLZ: Pulse train input Z
Output terminal
[CC-01] to
[CA-06]
043 POK: Positioning completion -
Relay output terminal [CA-07]

 Loading...
Loading...










