List of Parameters
Parameters
1-157
© Siemens AG 2007 All Rights Reserved
SINAMICS G120 Control Units CU240S, Edition 05/2007
1) If the speed control (main setpoint) is selected a torque setpoint is available via the
additional setpoint channel.
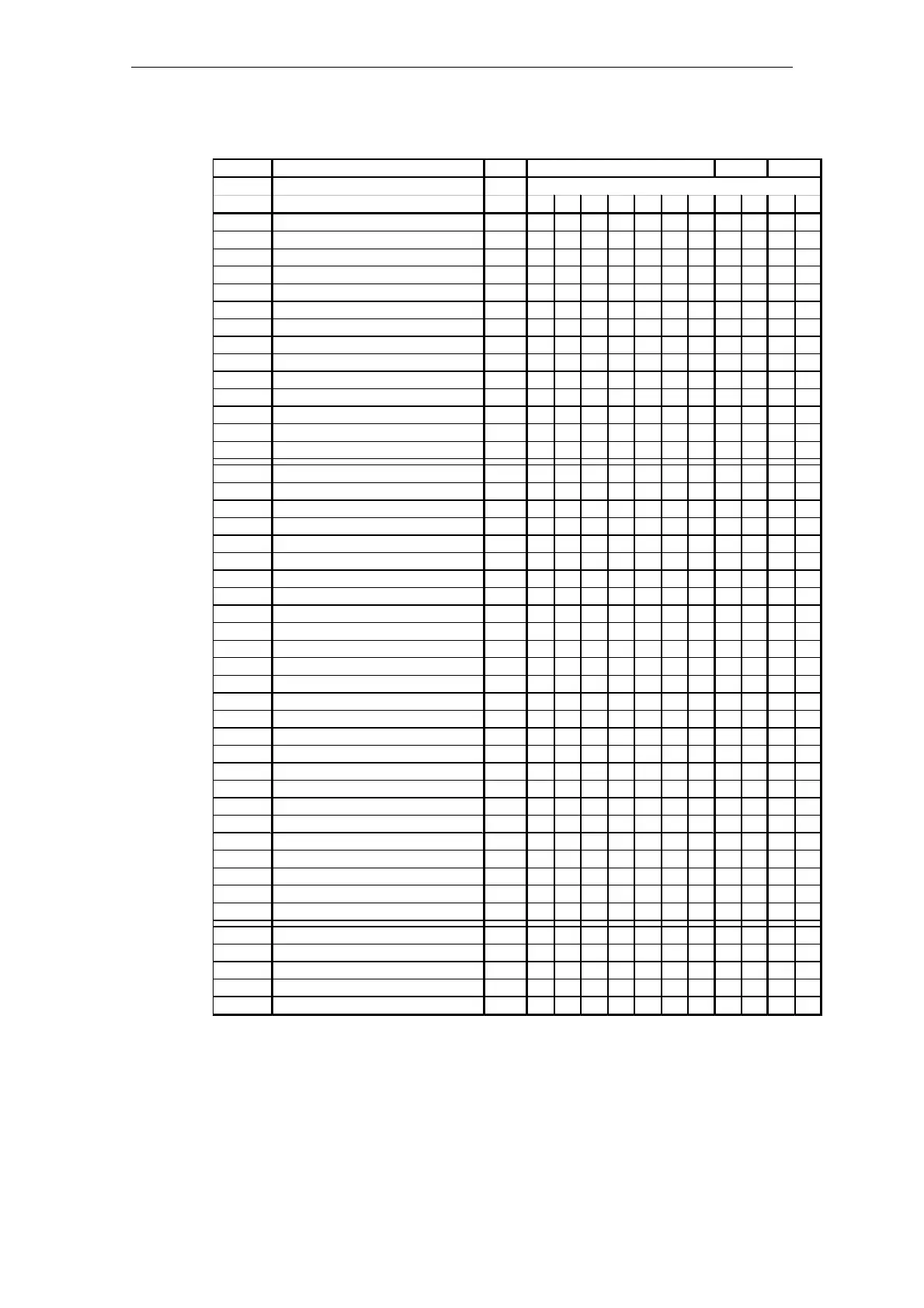
ParNo. Leve l
0 1 2 3 5 6 19 20 22 21 23
P1400[3] 3
−−−−−−−−−
x
−
P1442[3] 3
−−−−−−−−−
x
−
P1452[3] 3
−−−−−−−
x
−−−
P1460[3] 2
−−−−−−−−−
x
−
P1462[3] 2
−−−−−−−−−
x
−
P1470[3] 2
−−−−−−−
x
−−−
P1472[3] 2
−−−−−−−
x
−−−
P1477[3] 3
−−−−−−−
x
−
x
−
P1478[3] 3
−−−−−−−
x
−
x
−
P1488[3] 3
−−−−−−−
x
−
x
−
P1489[3] 3
−−−−−−−
x
−
x
−
P1492[3] 3
−−−−−−−
x
−
x
−
P1496[3] 3
−−−−−−−
x
−
x
−
P1499[3] 3
−−−−−−−−
x
−−
P1500[3] 2
−−−−−−−
xxxx
P1501[3] 3
−−−−−−−
xxxx
P1503[3] 3
−−−−−−−−
x
−
x
P1511[3] 3
−−−−−−−
xxxx
P1520[3] 2
−−−−−−−
xxxx
P1521[3] 2
−−−−−−−
xxxx
P1522[3] 3
−−−−−−−
xxxx
P1523[3] 3
−−−−−−−
xxxx
P1525[3] 3
−−−−−−−
xxxx
P1530[3] 2
−−−−−−−
xxxx
P1531[3] 2
−−−−−−−
xxxx
P1570[3] 2
−−−−−−−
xxxx
P1574[3] 3
−−−−−−−
xxxx
P1580[3] 2
−−−−−−−
xxxx
P1582[3] 3
−−−−−−−
xxxx
P1596[3] 3
−−−−−−−
xxxx
P1610[3] 2
−−−−−−−
xx
−−
P1611[3] 2
−−−−−−−
xx
−−
P1740 3
−−−−−−−
xx
−−
P1750[3] 3
−−−−−−−
xxxx
P1755[3] 3
−−−−−−−
xx
−−
P1756[3] 3
−−−−−−−
xx
−−
P1758[3] 3
−−−−−−−
xx
−−
P1759[3] 3
−−−−−−−
xx
−−
P1764[3] 3
−−−−−−−
xx
−−
P1780[3] 3
−−−−−−−
xx
−−
P0400[3] 2
−−−−−−−−−
xx
P0408[3] 2
−−−−−−−−−
xx
P0491[3] 2
−−−−−−−−−
xx
P0492[3] 2
−−−−−−−−−
xx
P0494[3] 2
−−−−−−−−−
xx
VCV/f SLVC
P1300 =
Parameter name
Configuration of speed control
Filter time for act. speed
Filter time for act.speed (SLVC)
Gain speed controller
Integral time speed controller
Gain speed controller (SLVC)
Integral time n-ctrl. (SLVC)
BI: Set integrator of n-ctrl.
CI: Set integrator value n-ctrl.
Droop input source
Droop scaling
Enable droop
Scaling accel. precontrol
Scaling accel. torque control
Selection of torque setpoint
BI: Change to torque control
CI: Torque setpoint
CI: Additional torque setpoint
CO: Upper torque limit
CO: Lower torque limit
CI: Upper torque limit
CI: Lower torque limit
Scaling lower torque limit
Motoring power limitation
Regenerative power limitation
CO: Fixed value flux setpoint
Dynamic voltage headroom
Efficiency optimization
Smooth time for flux setpoint
Int. time field weak. controller
Continuous torque boost (SLVC)
Acc. torque boost (SLVC)
Gain for oscillation damping
Control word of motor model
Start-freq. motor model (SLVC)
Hyst.-freq. motor model (SLVC)
T(wait) transit to feed-fwd-mode
T(wait) for n-adaption to settle
Kp of n-adaption (SLVC)
Control word of Rs/Rr-adaption
Select encoder type
Encoder pulses per revolution
Reaction on speed signal loss
Allowed speed difference
Delay speed loss reaction
 Loading...
Loading...






