Parameter Details
12
12.2 b: APPLICATION
SIEPCYEUOQ2V01A Q2V Technical Manual 469
Use the PID feedback loss detection function when you use PID control. If the feedback signal is too low, the
motor can suddenly accelerate to the maximum output frequency. This function prevents such risks to the load.
The drive uses two methods to detect feedback loss:
• PID Feedback Loss [FbL]
Set these parameters for the PID feedback loss detection function.
The drive detects feedback loss when the feedback value is less than the value in b5-13 for longer than the time
in b5-14.
– b5-12 [Fdback Loss Select Mode]
– b5-13 [Fdback Loss Lvl]
– b5-14 [Fdback Loss Time]
• Excessive PID Feedback [FbH]
Set these parameters to set how the drive detects a feedback level that is too high.
The drive detects too much PID feedback when the feedback value is more than the value in b5-36 for longer
than the time in b5-37.
– b5-12 [Fdback Loss Select Mode]
– b5-36 [PID HiHi Limit Level]
– b5-37 [PID HiHi Time]
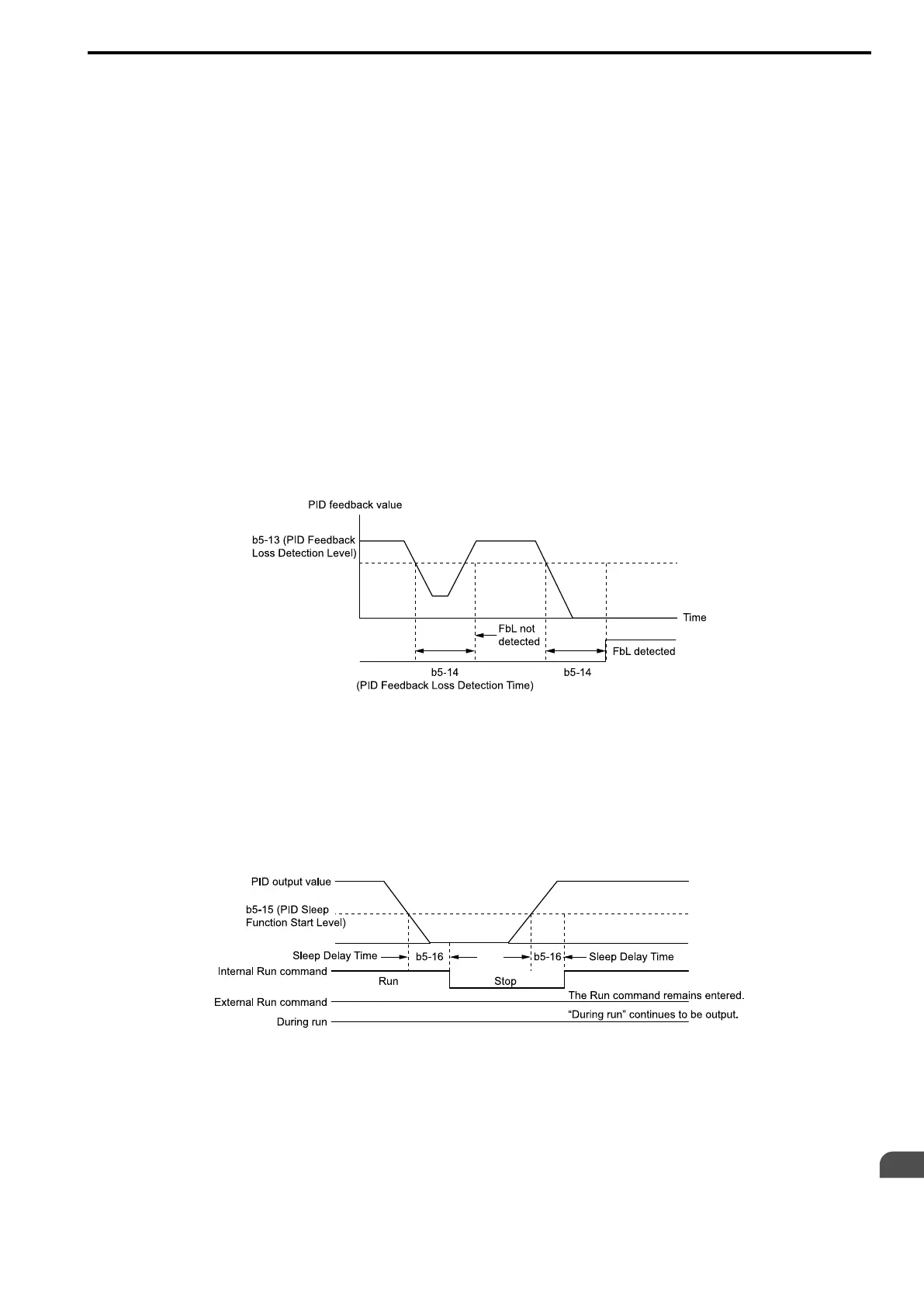
This figure shows the operation principle when the feedback value is too low, and the drive detects feedback loss.
The operation is the same when the drive detects too much feedback.
Figure 12.30 Time Chart for PID Feedback Loss Detection Time
■ PID Sleep
PID sleep stops drive operation when the PID output or the frequency reference is less than b5-15 [Sleep Start
Level]. This function shuts off drive output after the motor decelerates to the set frequency.
The drive will automatically restart the motor when the PID output or the frequency reference is more than the b5-
15 value for the time set in b5-16 [Sleep Delay Time].
This figure shows the PID Sleep function.
Figure 12.31 PID Sleep Time Chart
Note:
• The PID Sleep function is enabled when PID control is disabled.
• When the PID Sleep function is triggered, the drive will stop the motor as specified by b1-03 [Stopping Method Selection].
■ Fine-Tuning PID
Fine-tune the following parameter settings to have PID control eliminate problems with overshoot and oscillation.
• b5-02 [Proportional Gain (P)]

 Loading...
Loading...










