7 - 21
7 Advanced Settings
High-function General-purpose Inverter RX2 Series User’s Manual
7-2 Selection of Motor Control Methods
7
7-2-10 Vector Control with Sensor
Precautions for Correct Use
• Set the Carrier speed setting, 1st-motor [bb101] at a value of 2.0 kHz or higher. A set fre-
quency of 1.9 kHz or lower may cause an incorrect operation.
• When the revolution of the motor is hindered by such causes as the braking or the motor lock
caused by foreign objects, such hindrance may cause over current or the like. When no such
adjustment as ones mentioned above improves the state, checking the portion around the
motor may sometimes improves it.
• If an application of load results in a great amount of change in the inverter’s output frequency
monitor [dA-01], a function to automatically change the frequencies for the overload limiting
function, the momentary-stop non-stop function, the over voltage suppression function may
work depending upon the settings of the functions.
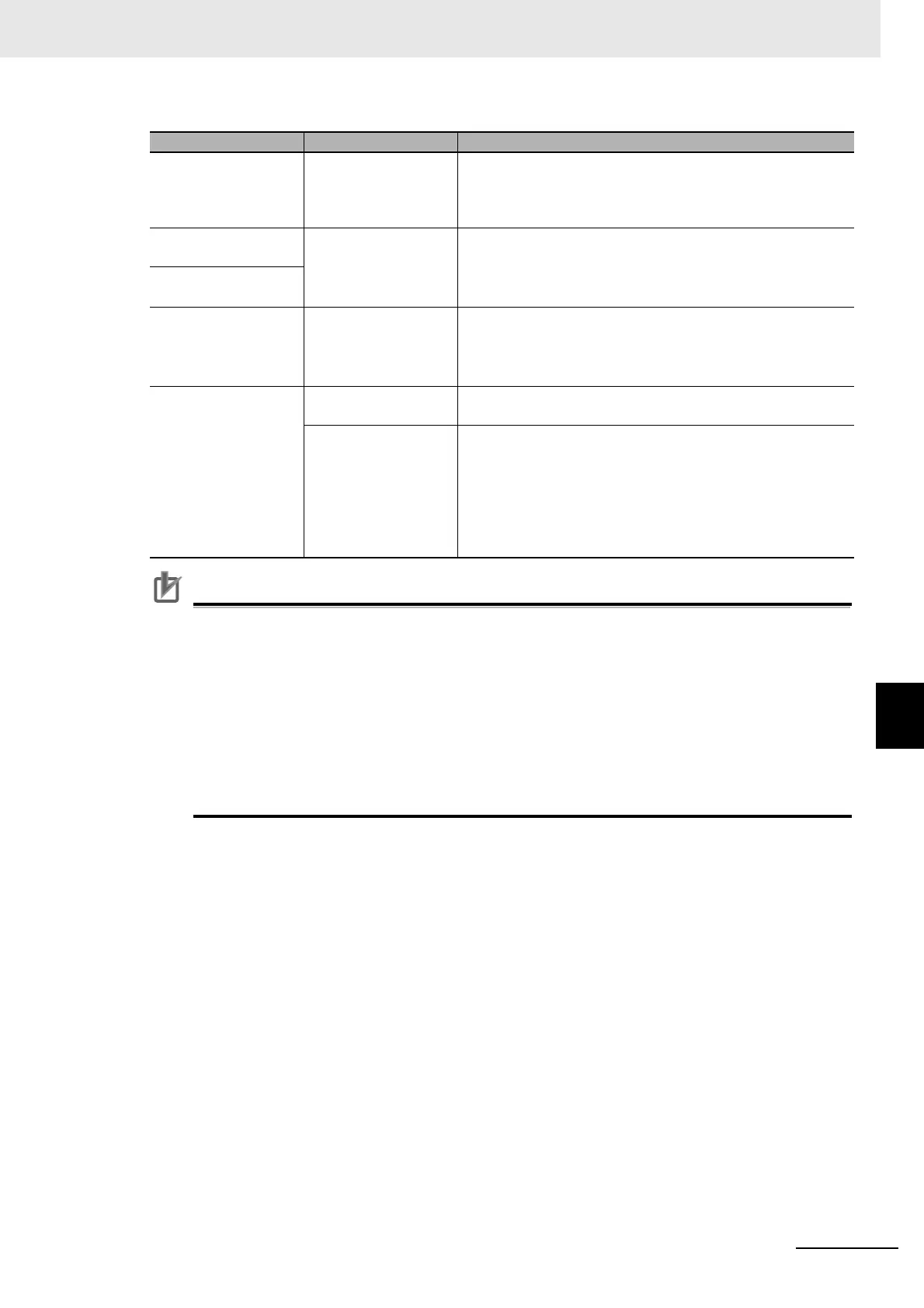
Phenomenon Estimated cause(s) Exemplar measures to be taken
The performance is
not sufficient for what
the motor control char-
acteristics predict.
An improper motor
constant is being used.
The performance may be improved by automatic tuning.
Check 6-2-3 Auto-tuning of Motor on page 6-14.
Socks occur during the
revolutions at the start.
The control system
has a frequency
response that is too
high.
• Make an adjustment by decrementing the response adjust-
ment [HA115] by 5% each time.
• Make an adjustment by decrementing the IM motor constant
J [Hb118] by 5% each time.
The motor is hunting.
Unsteady revolutions
at low speeds, result-
ing in fluctuating revo-
lutions.
The control system
has a frequency
response that is too
low.
• Make an adjustment by incrementing the response adjust-
ment [HA115] by 5% each time.
• Make an adjustment by incrementing the IM motor constant
J [Hb118] by 5% each time.
Normal acceleration is
impossible and the
protection against the
over load works.
An improper motor
constant is being used.
The performance may be improved by automatic tuning.
Check 6-2-3 Auto-tuning of Motor on page 6-14.
An improper phase
sequence is being
used.
Set V/f control (00) in [AA121], and check the frequency detec-
tion value monitor [dA-08]. The wiring is correct if the forward
operation [FW] has a positive (+) value and if the reversal
operation [RV] has a negative (-) value. If the forward and neg-
ative operations have incorrect values, rearrange the phase
sequence in the encoder or check again, 7-2-16 Encoder
Feedback Control on page 7-37.