7 Advanced Settings
7 - 28
High-function General-purpose Inverter RX2 Series User’s Manual
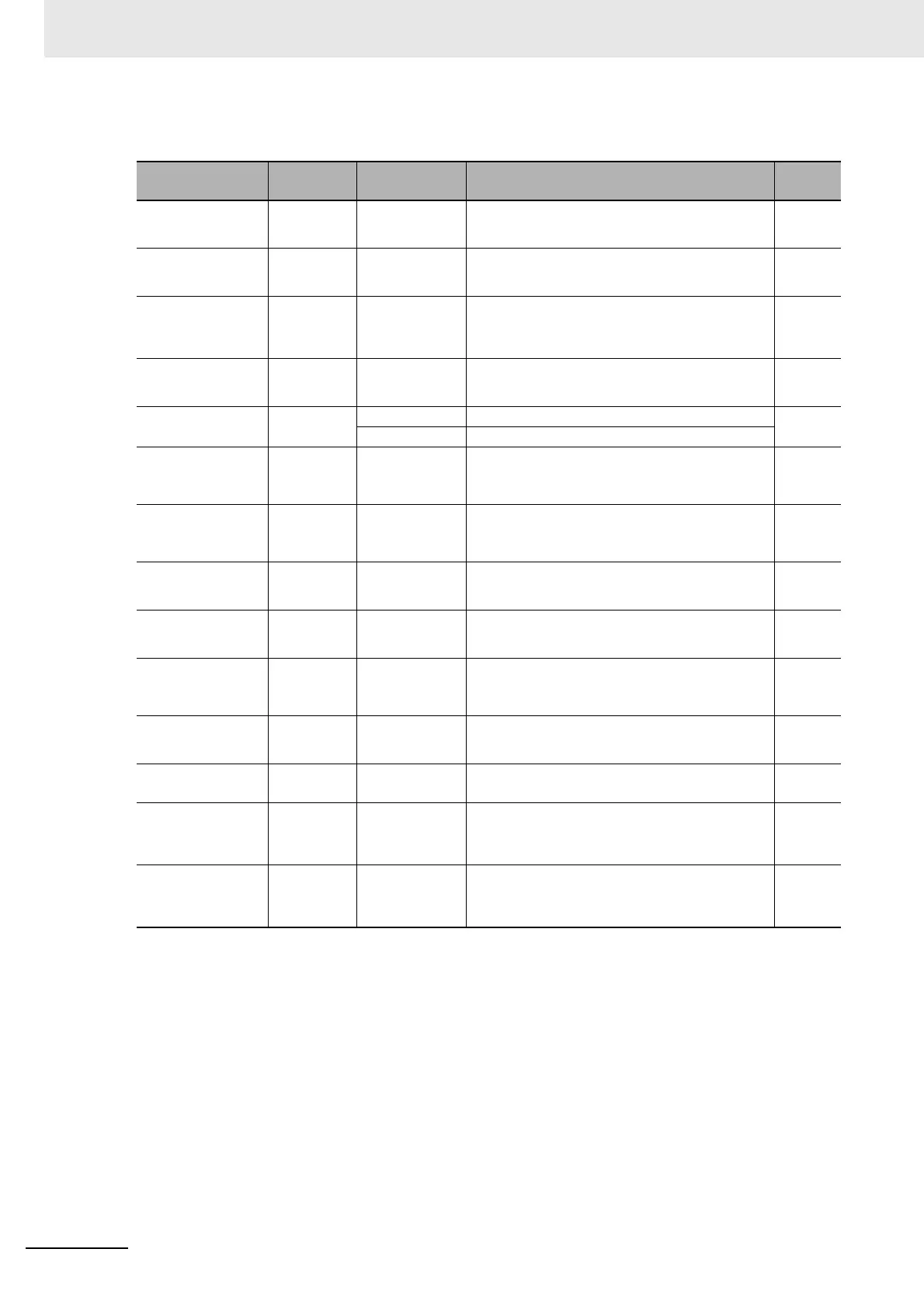
Parameters Common to This Mode and the Synchronous Starting Mode
Item Parameter Data Description
Default
data
Control mode
selection,
1st-motor
[AA121]
12
*1
*1. Cannot be selected if [Ub-03] duty spec selection is 00 (VLD).
To use IVMS-start type sensorless vector con-
trol (SM/PMM)
00
Speed response
for Async.M,
1st-motor
[HA115] 0 to 1000(%)
To adjust the responsiveness of the control.
A larger value enhances the responsiveness.
100
Minimum Fre-
quency for
Sync.M-SLV,
1st-motor
[Hd130] 0 to 50(%)
The frequency at which the sensorless vector
control is started.
Set the ratio to the base frequency [Hd104].
8
No-Load current
for Sync.M-SLV,
1st-motor
[Hd131] 0 to 100(%)
Set the ratio of the no-load current to the rated
current during the sensorless vector control.
10
Starting Method for
Sync.M, 1st-motor
[Hd132]
00 Initial position estimation is disabled.
00
01 Initial position estimation is enabled.
IMPE 0V wait num-
ber for Sync.M,
1st-motor
[Hd133] 0 to 255
This is a stand-by adjustment value to stabilize
the reference value for the initial position esti-
mation detection.
10
IMPE detect wait
number for
Sync.M, 1st-motor
[Hd134] 0 to 255
This is an adjustment value to stabilize the cur-
rent rise of the initial position estimation opera-
tion.
10
IMPE detect num-
ber for Sync.M,
1st-motor
[Hd135] 0 to 255
This is a detection-operation adjustment value
of the initial position estimation operation.
30
IMPE voltage gain
for Sync.M,
1st-motor
[Hd136] 0 to 200(%)
This is a output-voltage adjustment gain of the
initial position estimation operation.
100
IMPE Mg-pole
position offset,
1st-motor
[Hd137] 0 to 359(°)
To conduct corrections in a case where the ini-
tial position estimation operation has a certain
error.
0
DC braking
selection,
1st-motor
[AF101] 01 Internal DC braking: enabled 00
DC braking force at
start, 1st-motor
[AF108] 0 to 100(%)
To adjust the DC braking force. Setting of 100%
will provide maximum braking force.
30
DC braking active
time at start,
1st-motor
[AF109] 0.0 to 60.0(s)
Enabled during the internal DC braking.
When the operation command is turned ON, DC
bra
king is started.
0.00
Over current detec-
tion level,
1st-motor
[bb160]
Inverter ND
rated current ×
(0.20 to 2.20)
To Set the level at which the over current is
detected.
2.20 ×
Inverter
ND rated
current