8 Applied Settings
8 - 8
High-function General-purpose Inverter RX2 Series User’s Manual
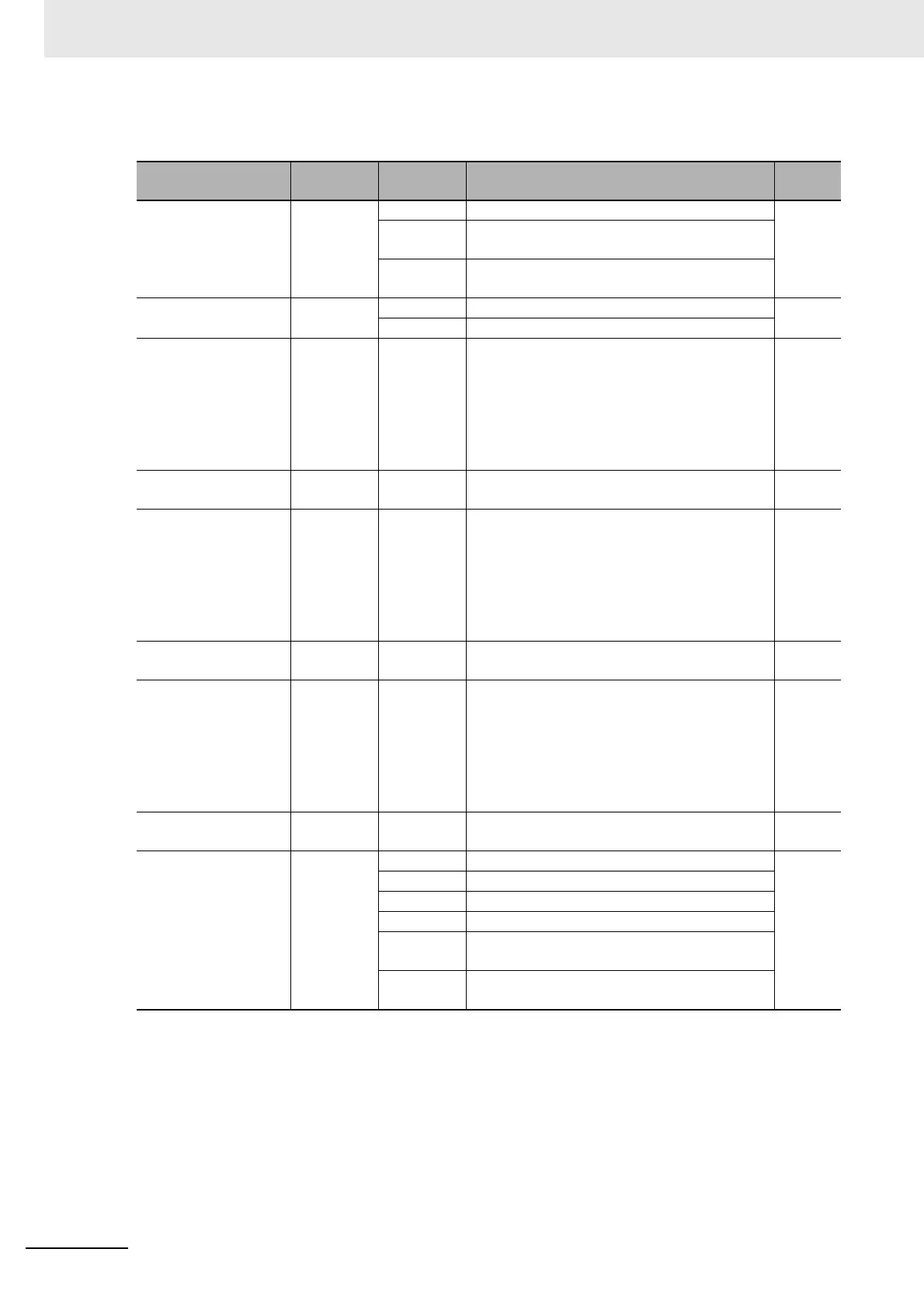
Parameter
Item Parameter Data Description
Default
data
PID1 enable [AH-01]
00 Disable
00
01
Enable (if command becomes negative, it does
not output in a reverse direction)
02
Enable (if command becomes negative, it out-
puts in a reverse direction)
PID1 deviation inverse [AH-02]
00 Disable
00
01 Enable (polarity inversion of deviation)
PID1 deviation inverse [AH-07] 00 to 13
00: Disable, 01: Ai1-L input, 02: Ai2-L input,
03: Ai3-L input, 04: (Reserved), 05: (Reserved),
06: (Reserved), 07: Parameter setting [AH-10]
08: RS 485 communication, 09: Option 1,
10: Option 2, 11: Option 3,
12: Pulse train input (main unit),
13: Pulse train input (option)
07
Set-point-1 setting for
PID1
[AH-10]
-100.00 to
100.00(%)
*1
*1. Data range varies depending on the data from [AH-04] to [AH-06].
This is a set value 1 of PID1 target value 1. 0.00
Input source selection
of Set-point 2 for PID1
[AH-42] 00 to 13
00: Invalid, 01: Ai1-L input, 02: Ai2-L input,
03: Ai3-L input, 04: (Reserved), 05: (Reserved),
06: (Reserved), 07: Parameter setting [AH-44],
08: RS 485 communication, 09: Option 1,
10: Option 2, 11: Option 3,
12: Pulse train input (main unit),
13: Pulse train input (option)
00
Set-point 2 setting for
PID1
[AH-44]
-100.00 to
100.00(%)
*1
This is a set value of PID1 target value 2. 0.00
Input source selection
of Set-point 3 for PID1
[AH-46] 00 to 13
00: Invalid, 01: Ai1-L input, 02: Ai2-L input,
03: Ai3-L input, 04: (Reserved), 05: (Reserved),
06: (Reserved), 07: Parameter setting [AH-48],
08: RS 485 communication, 09: Option 1,
10: Option 2, 11: Option 3,
12: Pulse train input (main unit),
13: Pulse train input (option)
00
Set-point 3 setting for
PID1
[AH-48]
-100.00 to
100.00(%)
*1
This is a set value of PID1 target value 3. 0.00
Calculation symbol
selection of Set-point 1
for PID1
[AH-50]
01 (Target value 1) + (Target value 2)
01
02 (Target value 1) - (Target value 2)
03 (Target value 1) x (Target value 2)
04 (Target value 1) / (Target value 2)
05
Minimum deviation among input destinations 1,
2, and 3
06
Maximum deviation among input destinations 1,
2, and 3