8 - 9
8 Applied Settings
High-function General-purpose Inverter RX2 Series User’s Manual
8-1 PID Control
8
8-1-2 PID Parameter and Block Diagram
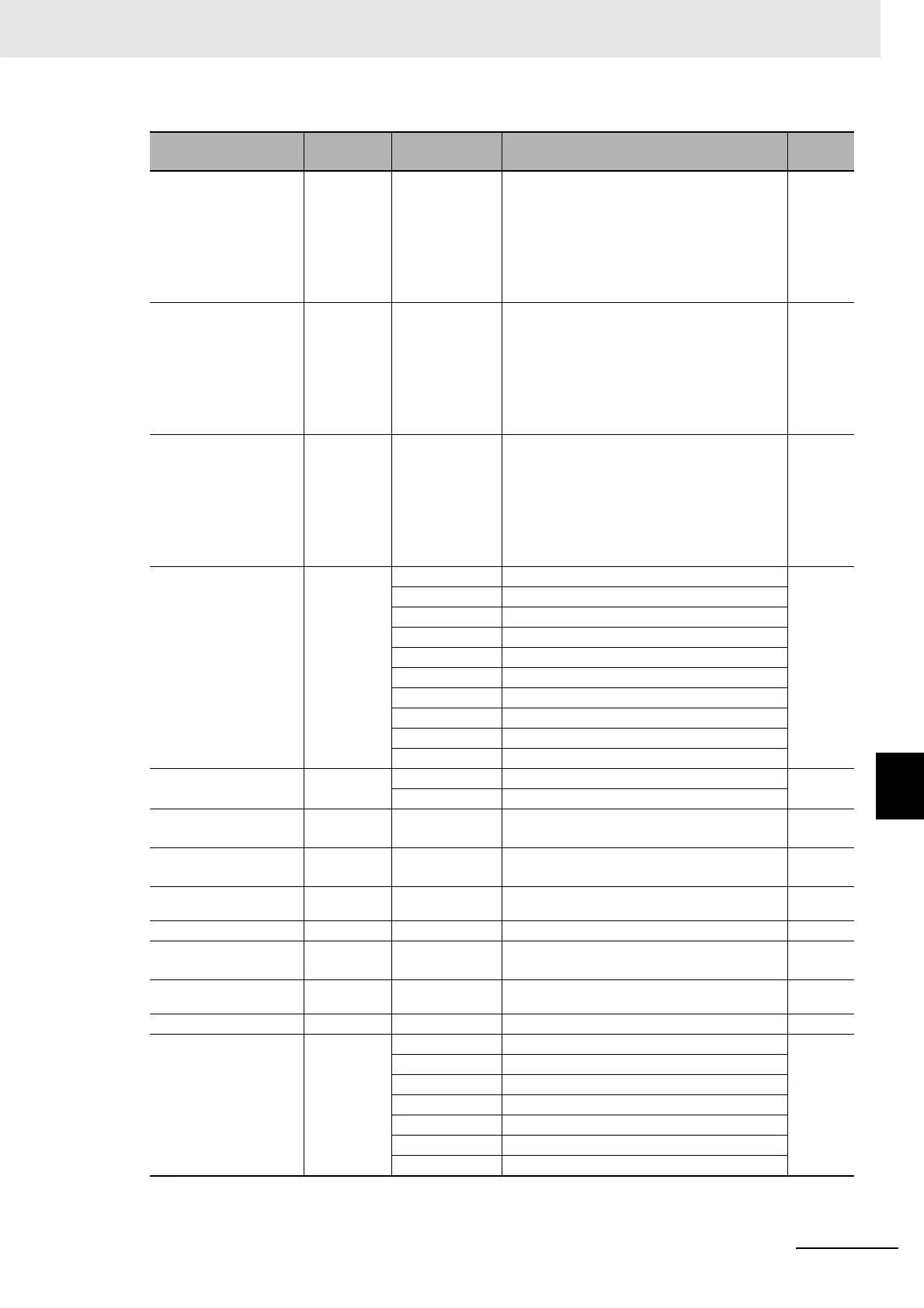
Item Parameter Data Description
Default
data
Input source selection
of Process data 1 for
PID1
[AH-51]
00 to 06,
08 to 13
00: Invalid, 01: Ai1-L input, 02: Ai2-L input,
03: Ai3-L input, 04: (Reserved),
05: (Reserved), 06: (Reserved),
08: RS 485 communication, 09: Option 1,
10: Option 2, 11: Option 3,
12: Pulse train input (main unit),
13: Pulse train input (option)
01
Input source selection
of Process data 2 for
PID1
[AH-52]
00 to 06,
08 to 13
00: Invalid, 01: Ai1-L input, 02: Ai2-L input,
03: Ai3-L input, 04: (Reserved),
05: (Reserved), 06: (Reserved),
08: RS 485 communication, 09: Option 1,
10: Option 2, 11: Option 3,
12: Pulse train input (main unit),
13: Pulse train input (option)
00
Input source selection
of Process data 3 for
PID1
[AH-53]
00 to 06,
08 to 13
00: Invalid, 01: Ai1-L input, 02: Ai2-L input,
03: Ai3-L input, 04: (Reserved),
05: (Reserved), 06: (Reserved),
08: RS 485 communication, 09: Option 1,
10: Option 2, 11: Option 3,
12: Pulse train input (main unit),
13: Pulse train input (option)
00
Calculation symbol
selection of Process
data for PID1
[AH-54]
01 (FB1)+(FB2)
01
02 (FB1)-(FB2)
03 (FB1)×(FB2)
04 (FB1)÷(FB2)
05 Square root of FB1
06 Square root of FB2
07 Square root of (FB1 - FB2)
08 Average of FB1/FB2/FB3
09 Minimum of FB1/FB2/FB3
10 Maximum of FB1/FB2/FB3
PID1 gain change
method selection
[AH-60]
00 Disable (gain 1 is used)
00
01 Switch by [PRO] terminal
PID1 proportional gain
1
[AH-61] 0.0 to 100.0 Proportional gain 1.0
PID1 integral time con-
stant 1
[AH-62] 0.0 to 3600.0(s) Integral gain 1.0
PID1 derivative gain 1 [AH-63]
0.00 to
100.00(s)
Differential gain 0.00
PID proportional gain 2 [AH-64] 0.0 to 100.0 Proportional gain 0.0
PID integral time con-
stant 2
[AH-65] 0.0 to 3600.0(s) Integral gain 0.0
PID1 derivative gain 2 [AH-66]
0.00 to
100.00(s)
Differential gain 0.00
PID1 gain change time [AH-67] 0 to 10000(ms) Time for switch by [PRO] terminal operation 100
PID feed-forward
selection
[AH-70]
00 Disable
00
01 [Ai1] terminal input
02 [Ai2] terminal input
03 [Ai3] terminal input
04 (Reserved)
05 (Reserved)
06 (Reserved)