8 Applied Settings
8 - 12
High-function General-purpose Inverter RX2 Series User’s Manual
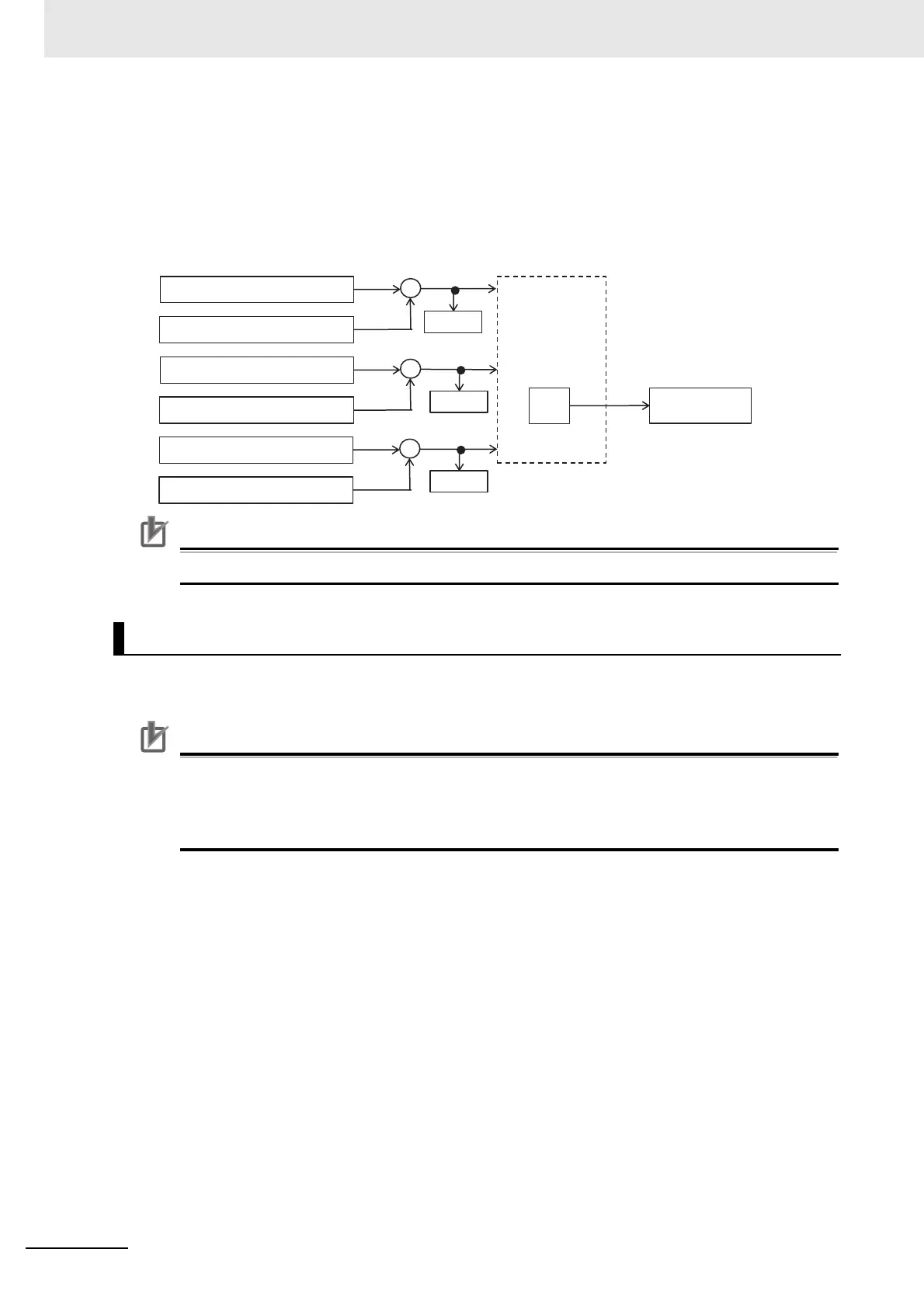
When Operator [AH-50] is 05 or 06
When 05 or 06 is selected in operator [AH-50],
(Target value 1) - (Feedback value 1)
(Target value 2) - (Feedback value 2)
(Target value 3) - (Feedback value 3)
these 3 deviations are compared and PID calculation is performed by using the deviation of mini-
mum (05)/maximum (06).
Precautions for Correct Use
Select 00: Disable for target value and feedback value not in use.
PID1 multi-layer target value (0 to 15 speed) become selectable by assigning 051 to 054 ([SVC1] to
[SVC4]) to input terminals 1 to 9, A or B selection [CA-01] to [CA-11].
Precautions for Correct Use
• Stand-by time until terminal input finalization is settable by multi-layer input finalize time
[CA-55]. It prevents the transition status of switching terminals from being selected.
• Data is determined after the elapse of a set time for [CA-55] without input change. When you
makes the set time longer, input response shows slower.
PID Target Value Multi-layer Switch Function
+
+
+
-
-
-
[db-52]
[db-53]
[db-54]
PID1 target value 2
PID1 deviation
PID1 feedback value 2
PID1 target value 3
PID1 feedback value 3
PID1 target value 3
PID1 feedback value 3
Calcul
ation
Operator [AH-50]
Minimum deviation (05)
Maximum deviation (06)
 Loading...
Loading...











