If an encoder is not connected, e.g., for a test without a motor, you can
specify a Rotary Servomotor or a Linear Servomotor in Pn000 =
n.X
(Rotary/Linear Startup Selection When Encoder Is Not Con-
nected). If you specify either a Rotary or Linear Servomotor, only the
parameters, monitors, alarms, and functions for the specified motor type
will be enabled.
Parameter Meaning When Enabled Classification
Pn000
n.0
(default
setting)
When an encoder is not
connected, start as SER-
VOPACK for Rotary Ser-
vomotor.
After restart Setup
n.1
When an encoder is not
connected, start as SER-
VOPACK for Linear Ser-
vomotor.
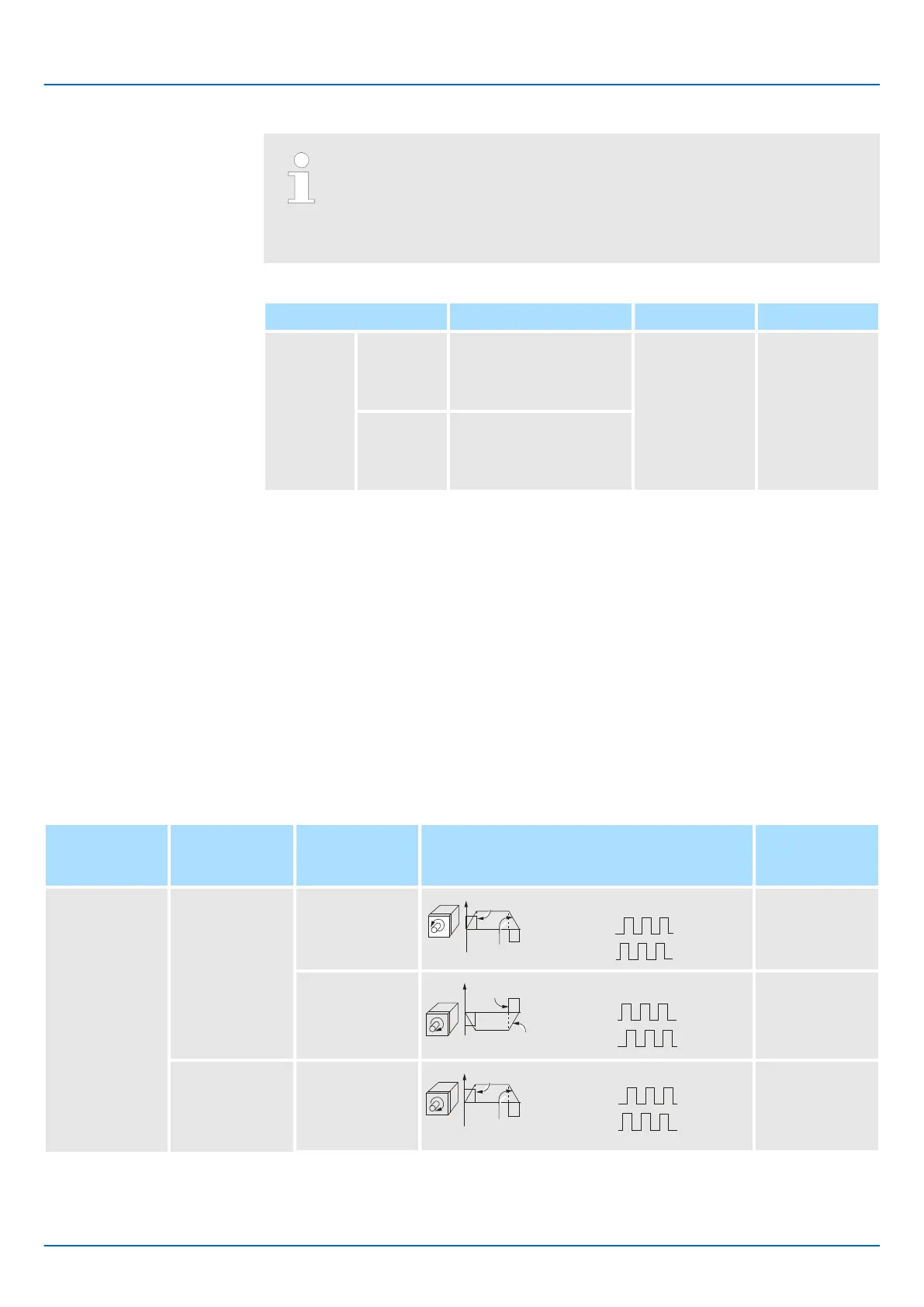
6.5 Motor Direction Setting
You can reverse the direction of Servomotor rotation by changing the setting of Pn000 =
n.X (Direction Selection) without changing the polarity of the speed or position ref-
erence. This causes the rotation direction of the motor to change, but the polarity of the
signals, such as encoder output pulses, output from the SERVOPACK do not change. Set
the appropriate direction for your system.
Refer to the following section for details on the encoder divided pulse output.
Ä
Chap. 7.6 ‘Encoder Divided Pulse Output’ page 213
The default setting for forward rotation is counterclockwise (CCW) as viewed from the
load end of the Servomotor.
Parameter Forward/
Reverse Refer-
ence
Motor Direction and Encoder Divided Pulse
Outputs
Applicable
Overtravel
Signal (OT)
Pn000
n.0 Use
CCW as the for-
ward direction.
(default setting)
Forward refer-
ence
Motor speed
Time
Torque reference
CCW
+
Encoder Divided Pulse Outputs
Phase-B lead
PAO
PBO
P-OT (Forward
Drive Prohibit)
signal
Reverse refer-
ence
Torque reference
Motor speed
Time
CW
+
Encoder Divided Pulse Outputs
Phase-A lead
PAO
PBO
N-OT (Reverse
Drive Prohibit)
signal
n.1 Use
CW as the for-
ward direction.
(Reverse Rota-
tion Mode)
Forward refer-
ence
Torque reference
Time
Motor speed
CW
+
Encoder Divided Pulse Outputs
Phase-B lead
PAO
PBO
P-OT (Forward
Drive Prohibit)
signal
Rotary Servomotors
Sigma-7 Series SERVOPACKs
Basic Functions That Require Setting before Operation
Motor Direction Setting
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 145

 Loading...
Loading...







