Refer to the following section for details on connections that are not
shown above, such as connections to power supplies and peripheral
devices.
Ä
Chap. 3.5 ‘Examples of Standard Connections between SERVO-
PACKs and Peripheral Devices’ page 73
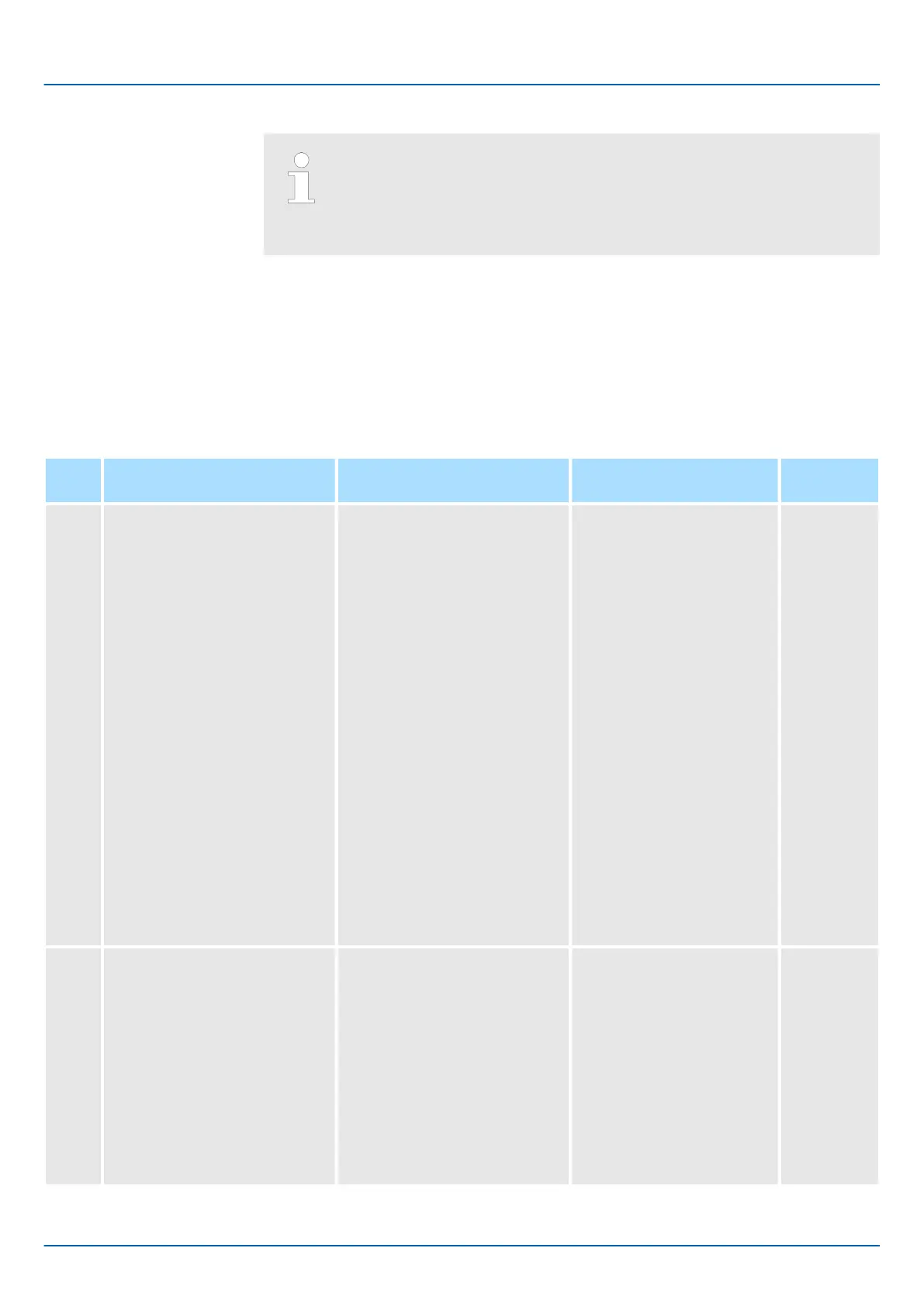
11.3 SERVOPACK Commissioning Procedure
First, confirm that the SERVOPACK operates correctly with semi-closed loop control, and
then confirm that it operates correctly with fully-closed loop control.
The commissioning procedure for the SERVOPACK for fully-closed loop control is given
below.
Step Description Operation Required Parameter and
Object Settings
Controlling
Device
1 Check operation of the entire
sequence with semi-closed loop
control and without a load.
Items to Check
n Power supply circuit wiring
n Servomotor wiring
n Encoder wiring
n Wiring of I/O signal lines
from the host controller
n Servomotor rotation direc-
tion, motor speed, and mul-
titurn data
n Operation of safety mecha-
nisms, such as the brakes
and the overtravel mecha-
nisms
Set the parameters so that the
SERVOPACK operates cor-
rectly in semi-closed loop con-
trol without a load and check
the following points. Set Pn002
to n.0 to specify semi-
closed loop control.
n Are there any errors in the
SERVOPACK?
n Does jogging function cor-
rectly when you operate the
SERVOPACK without a
load?
n Do the I/O signals turn ON
and OFF correctly?
n Is power supplied to the
Servomotor when the Servo
ON command (Enable
Operation command) is sent
from the host controller?
n Does the Servomotor
operate correctly when a
position reference is input
by the host controller?
n Pn000 (Basic Function
Selections 0)
n Pn001 (Application
Function Selection 1)
n Pn002 = n.X
(External Encoder
Usage)
n Position reference unit
(Position User Unit
(2301h))
n Pn50A, Pn50B, Pn511,
and Pn516 (Input Signal
Selections)
n Pn50E, Pn50F, Pn510,
and Pn514 (Output
Signal Selections)
SERVO-
PACK or
host con-
troller
2 Check operation with the Servo-
motor connected to the machine
with semi-closed loop control.
Items to Check
n Initial response of the
system connected to the
machine
n Movement direction, travel
distance, and movement
speed as specified by the
references from the host
controller
Connect the Servomotor to the
machine. Set the moment of
inertia ratio in Pn103 using
autotuning without a host refer-
ence.
Check that the machine’s move-
ment direction, travel distance,
and movement speed agree
with the references from the
host controller.
Pn103 (Moment of Inertia
Ratio)
Host con-
troller
Sigma-7 Series SERVOPACKs
Fully-Closed Loop Control
SERVOPACK Commissioning Procedure
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 455

 Loading...
Loading...







