8.4.2 Preparations
Confirm the following conditions before you jog the Servomotor.
n The parameters must not be write prohibited.
n The main circuit power supply must be ON.
n There must be no alarms.
n There must be no hard wire base block (HWBB).
n The servo must be OFF.
n The jogging speed must be set considering the operating range of the machine.
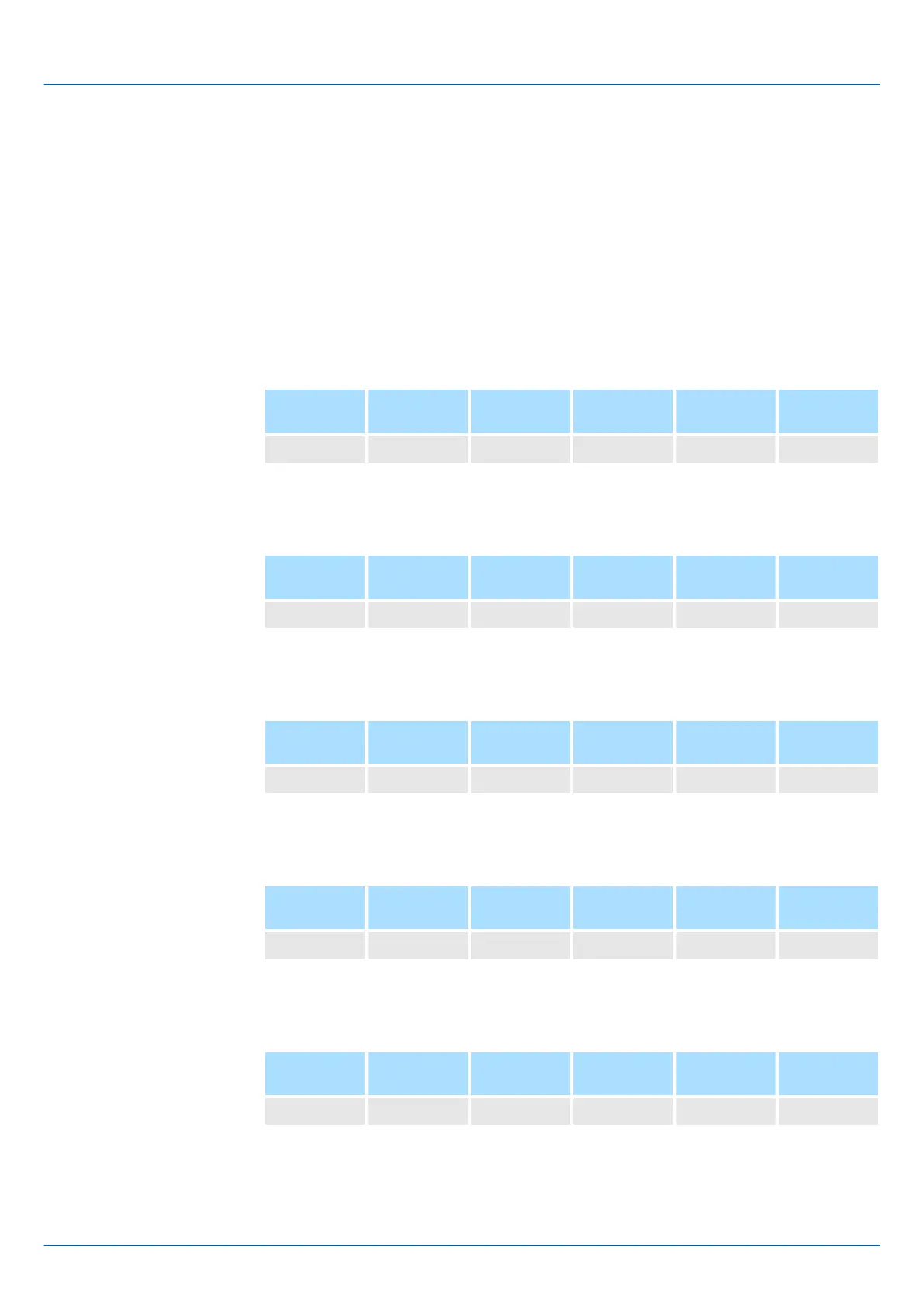
The jogging speed is set with the following parameters.
Jogging Speed
Setting
Range
Setting Unit Default Set-
ting
When Ena-
bled
Classifica-
tion
Pn304 0 to 10,000
1 min
-1
500 Immediately Setup
(applies to Speed Control, Position Control and Torque Control)
Soft Start Acceleration Time
Setting
Range
Setting Unit Default Set-
ting
When Ena-
bled
Classifica-
tion
Pn305 0 to 10,000 1 ms 0 Immediately Setup
(applies to Speed Control)
Soft Start Deceleration Time
Setting
Range
Setting Unit Default Set-
ting
When Ena-
bled
Classifica-
tion
Pn306 0 to 10,000 1 ms 0 Immediately Setup
(applies to Speed Control)
Jogging Speed
Setting
Range
Setting Unit Default Set-
ting
When Ena-
bled
Classifica-
tion
Pn304 0 to 10,000
0.1 min
-1
500 Immediately Setup
(applies to Speed Control, Position Control and Torque Control)
Soft Start Acceleration Time
Setting
Range
Setting Unit Default Set-
ting
When Ena-
bled
Classifica-
tion
Pn305 0 to 10,000 1 ms 0 Immediately Setup
(applies to Speed Control)
Rotary Servomotors
Direct Drive Servomotors
Sigma-7 Series SERVOPACKs
Trial Operation and Actual Operation
Trial Operation for the Servomotor without a Load > Preparations
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 268

 Loading...
Loading...







