Power supply to the Servomotor will be stopped immediately when an
alarm occurs, regardless of the setting of this parameter. The machine
moving part may move due to gravity or an external force before the
brake is applied.
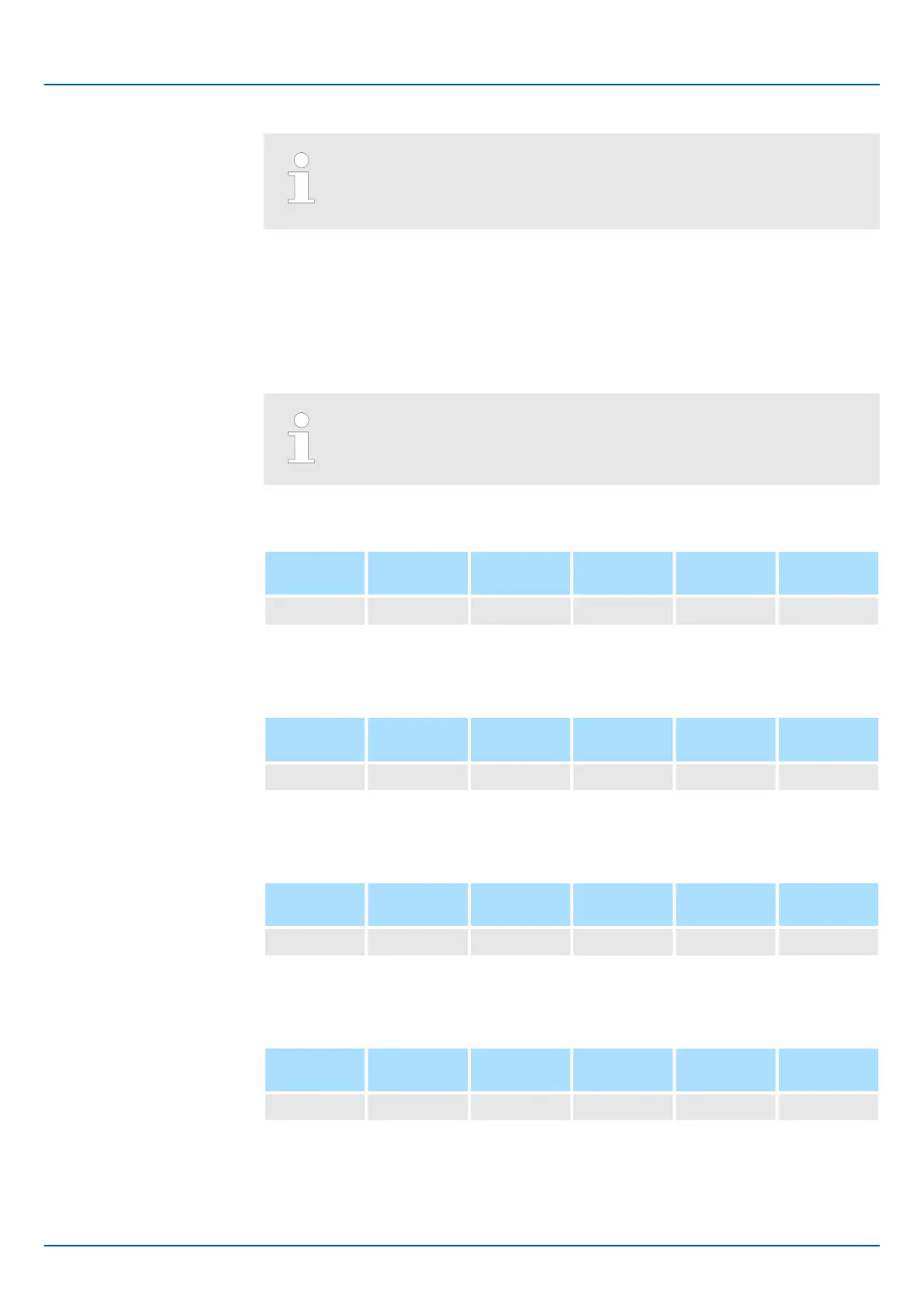
6.12.5 Output Timing of /BK (Brake) Signal When the Servomotor Is Operating
If an alarm occurs while the Servomotor is operating, the Servomotor will start stopping
and the /BK signal will be turned OFF. You can adjust the timing of /BK signal output by
setting the brake reference output speed level (Rotary Servomotors: Pn507, Linear Ser-
vomotors: Pn583) and the servo OFF-brake reference waiting time (Pn508).
If zero-speed stopping is set as the stopping method for alarms, the set-
ting of Pn506 (Brake Reference- Servo OFF Delay Time) is used after the
motor stops.
Brake Reference Output Speed Level
Setting
Range
Setting Unit Default Set-
ting
When Ena-
bled
Classifica-
tion
Pn507 0 to 10,000
1 min
-1
100 Immediately Setup
(applies to Speed Control, Position Control and Torque Control)
Servo OFF-Brake Reference Waiting Time
Setting
Range
Setting Unit Default Set-
ting
When Ena-
bled
Classifica-
tion
Pn508 10 to 100 10 ms 50 Immediately Setup
(applies to Speed Control, Position Control and Torque Control)
Brake Reference Output Speed Level
Setting
Range
Setting Unit Default Set-
ting
When Ena-
bled
Classifica-
tion
Pn583 0 to 10,000 1 mm/s 10 Immediately Setup
(applies to Speed Control, Position Control and Force Control)
Servo OFF-Brake Reference Waiting Time
Setting
Range
Setting Unit Default Set-
ting
When Ena-
bled
Classifica-
tion
Pn508 10 to 100 10 ms 50 Immediately Setup
(applies to Speed Control, Position Control and Force Control)
Rotary Servomotors
Linear Servomotors
Sigma-7 Series SERVOPACKs
Basic Functions That Require Setting before Operation
Holding Brake > Output Timing of /BK (Brake) Signal When the Servomotor Is Operating
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 171

 Loading...
Loading...







