This SERVOPACK supports both submodes “Manual Data Input” (MDI) and “Program”.
DO IO Data
Program
interpreter
SATZANW
(task select)
XIST_A
Program
motion record
STW1
(start, stop)
MDI_TARPOS
MDI_VELOCITY
MDI_ACC, MDI_DEC
Program control interface
Path interpolation
Motion command interface
Submode switch
MDI interface
Position and speed closed loop control
Position setpoint interface
Program
storage
Motion programs
AKTSATZ
TARPOS
ACC, DEC
Submode control
(SATZANW.15)
M
TARPOS
ACC DEC
Submode status
(AKTSATZ.15)
VELOCITY
VELOCITY
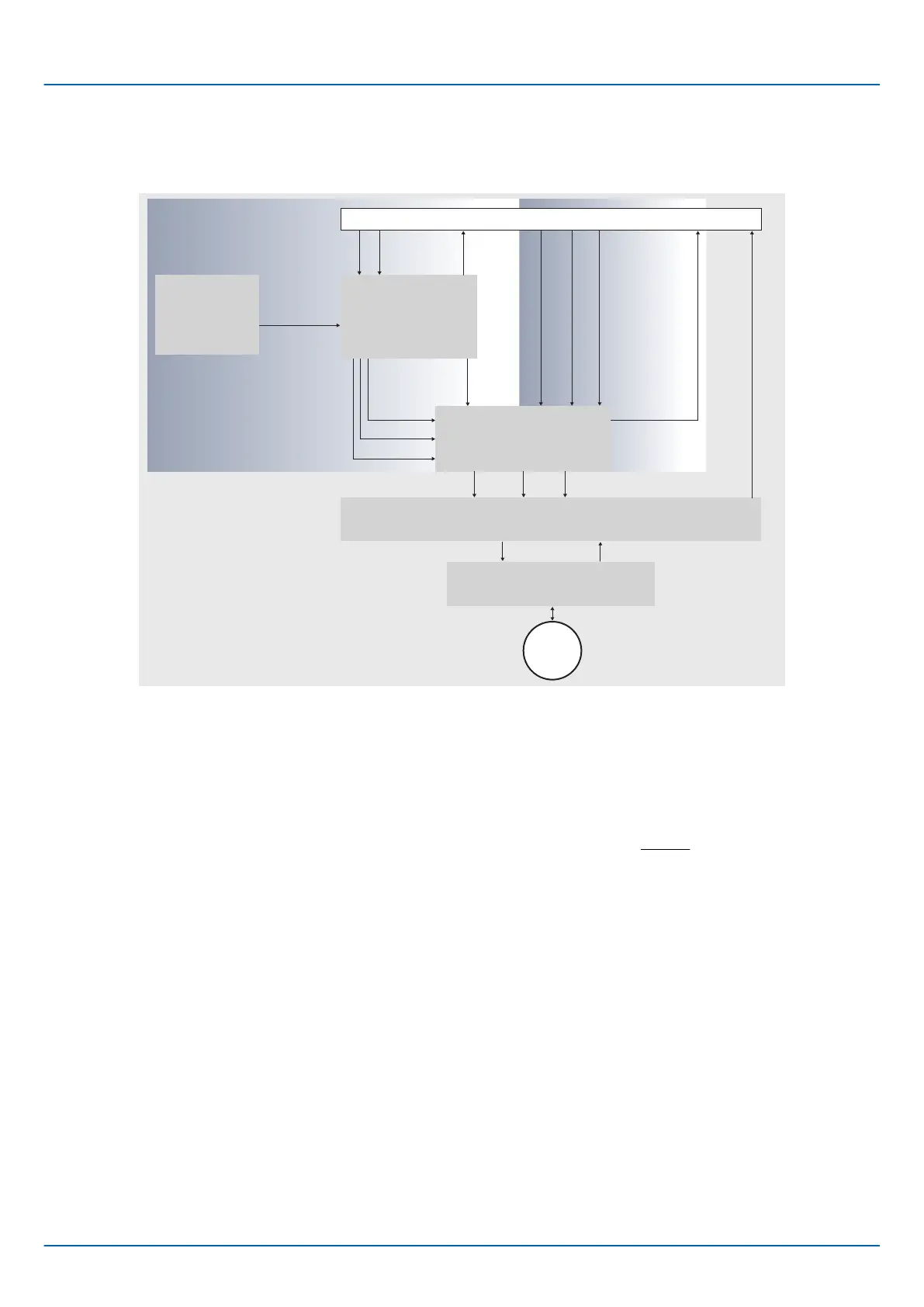
Program submode MDI submode
Fig. 364: Program Submode and MDI Submode
14.3.2 MDI Submode
The motion controller for Manual Data Input (MDI) submode comprises in addition to the
Program submode components also a submode switch which enables the direct access
to the motion command interface from the DO IO Data without using the program inter-
preter. This results in the advantage of immediate control of the motion command inter-
face by the controller via DO IO DATA.
Changeover from the program execution to the MDI interface and vice versa is controlled
by Bit 15 of Traversing Block Selection (SATZANW) (2532h):
n Bit 15 = 1
Activation of the MDI submode. If there is a program still running (extended state
machine not in the Basic State), the positioning interface will change to MDI Submode
only after the program ends or is terminated (STW1 bit 4).
n Bit 15 = 0
Deactivation of the MDI submode. If there is a MDI motion command still executed
the path interpolation shall stop and the MDI motion command shall be rejected.
If MDI submode is active, the input for the motion command interface of the path interpo-
lator will be taken out of the signals Target Position, Acceleration, Deceleration and
Velocity. These values get valid as input for the calculation of a new path from the actual
axis position to the new target position with the rising edge of STW1 bit 6. Controlling of
the motion process is done by the dedicated bits of STW1 out of the DO IO Data.
PROFIdrive Position
Submodes “MDI” and
“Program”
Activation / Deactivation
of the MDI submode
Sigma-7 Series SERVOPACKs
PROFIdrive Drive Profile
PROFIdrive Position Mode > MDI Submode
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 504

 Loading...
Loading...







