9.4.3 Torque Limit Settings
You can limit the torque that is output by the Servomotor based on calculations of the
torque required for machine operation. You can use torque limits to reduce the amount of
shock applied to the machine when problems occur, such as collisions or interference. If
the torque limit is lower than the torque that is required for operation, overshooting or
vibration may occur. Refer to the following section for details.
Ä
Chap. 7.8 ‘Selecting Torque Limits’ page 221
9.4.4 Setting the Position Deviation Overflow Alarm Level
The position deviation overflow alarm is a protective function that is enabled when the
SERVOPACK is used in position control.
If the alarm level is set to a suitable value, the SERVOPACK will detect excessive posi-
tion deviation and will stop the Servomotor if the Servomotor operation does not agree
with the reference.
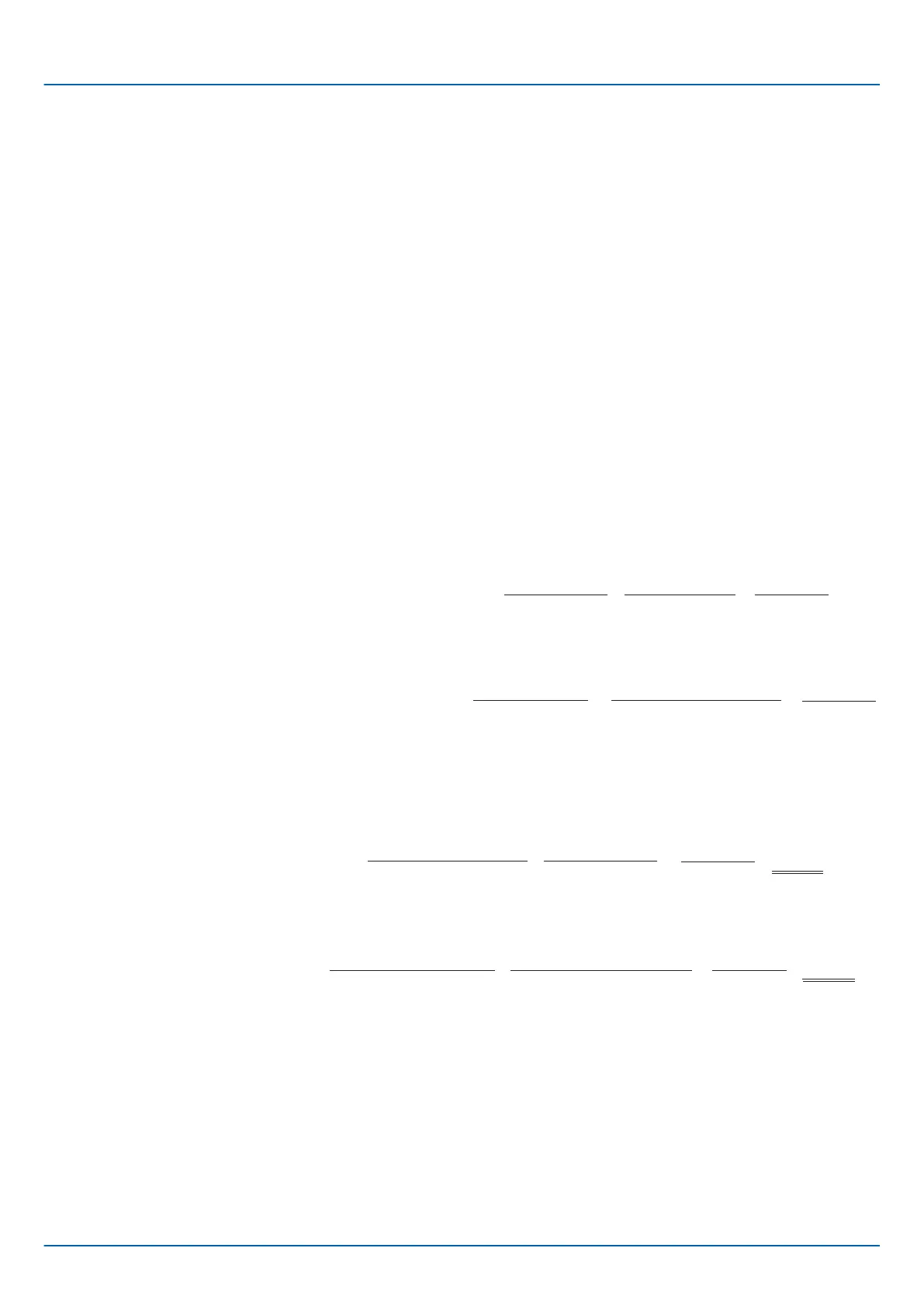
The position deviation is the difference between the position reference value and the
actual position.
You can calculate the position deviation from the position loop gain (Pn102) and the
motor speed with the following formula.
´
60
Pn102 [0.1/s]/10
*2, *3
´
Denominator
*1
Numerator
Encoder resolution
Motor speed [min
-1
]
Position deviation [reference units] =
Fig. 219: Position Deviation - Formula - Rotary Servomotors
Pn102 [0.1/s]/10
*2, *3
´ ´
Denominator
Numerator
Linear encoder pitch [mm]/1,000
ResolutionMotor speed [mm/s]
Position deviation [reference units] =
Fig. 220: Position Deviation - Formula - Linear Servomotors
Position Deviation Overflow Alarm Level (Pn520) [setting unit: reference units]
Pn520 > ´ ´
60
Pn102 [0.1/s]/10
*2, *3
´
Denominator
*1
Numerator
(1.2 to 2)
*4
Encoder resolutionMaximum motor speed [min-1]
Fig. 221: Position Deviation Overflow Alarm Level - Formula - Rotary Servomotors
Pn520 >
Pn102 [0.1/s]/10
*2, *3
´ ´
Denominator
*1
Numerator
(1.2 to 2)
*4
Linear encoder pitch [µm]/1,000
Resolution
Maximum motor speed [mm/s]
´
Fig. 222: Position Deviation Overflow Alarm Level - Formula - Linear Servomotors
*1. Refer to the following section for details.
Ä
Chap. 6.15 ‘Setting Unit Systems’ page 178
*2. When model following control (Pn140 = n.1) is enabled, use the setting of
Pn141 (Model Following Control Gain) instead of the setting of Pn102 (Position Loop
Gain).
*3. To check the setting of Pn102 on the Digital Operator, change the parameter display
setting to display all parameters (Pn00B = n.1).
Rotary Servomotors
Linear Servomotors
Rotary Servomotors
Linear Servomotors
Sigma-7 Series SERVOPACKs
Tuning
Precautions to Ensure Safe Tuning > Setting the Position Deviation Overflow Alarm Level
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 300

 Loading...
Loading...







