60B8h bit 0
(bit 8)
60B8h bit 4
(bit 12)
60B9h bit 0
(bit 8)
60B9h bit 1
(bit 9)
60BAh
(60BCh)
Probe input
Latching started. Latching started.
1 2 3
Latched position 1
Latched position 3
Fig. 371: Execution Procedure for a Touch Probe - Single Trigger Mode
Continuous Trigger Mode (60B8h bit 1 = 1 or bit 9 = 1)
60B8h bit 0
(bit 8)
60B8h bit 4
(bit 12)
60B9h bit 0
(bit 8)
60B9h bit 1
(bit 9)
60B9h bit 7
(bit 15)
60BAh
(60BCh)
Probe input
Latching started.
Latched position 1 Latched position 2
1 2 3
Latched position 3
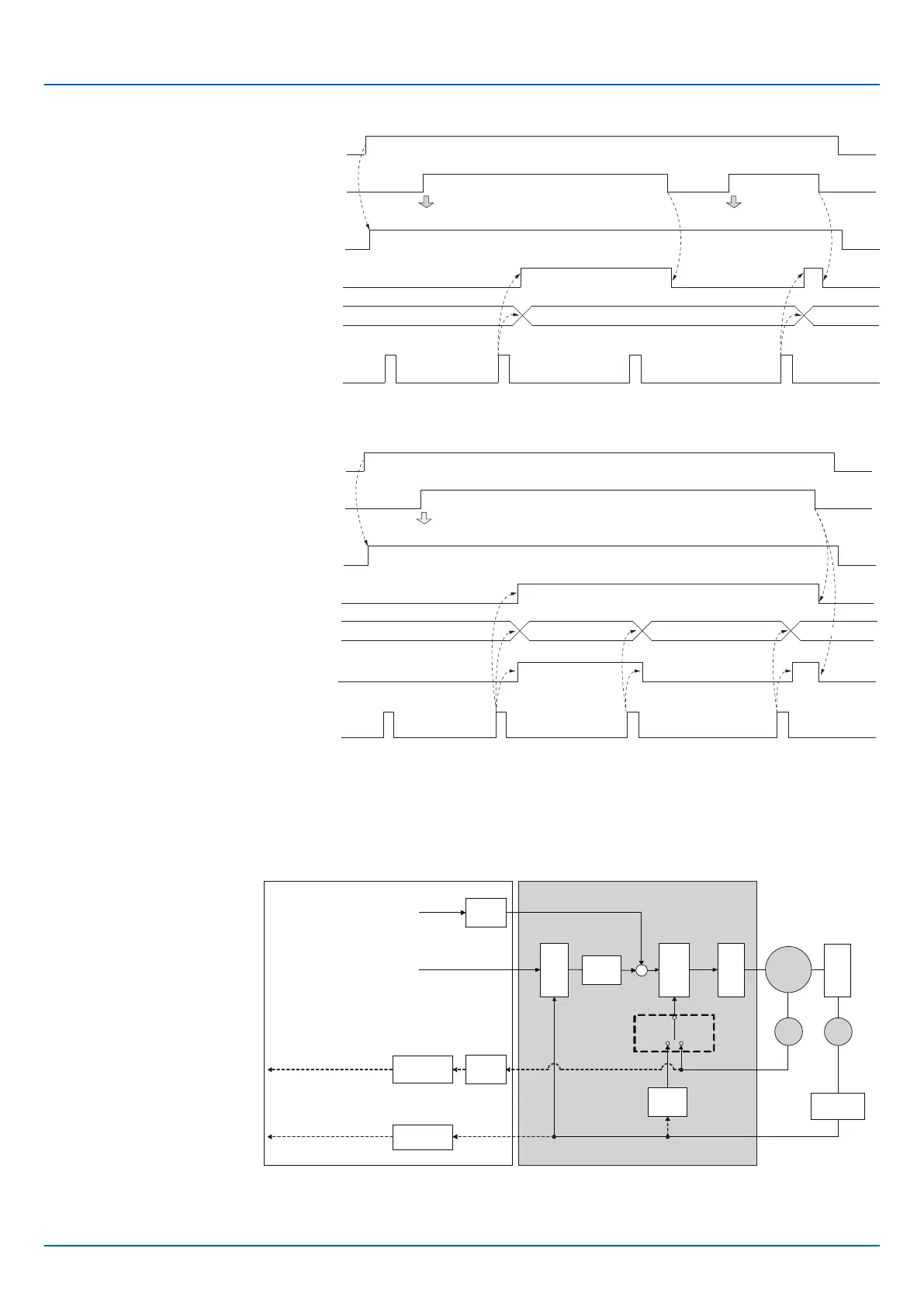
Fig. 372: Execution Procedure for a Touch Probe - Continuous Trigger Mode
14.10 Fully-closed Loop Control
The following figure shows the block diagram for the fully-closed loop control.
Position
control
loop
Velocity
control
loop
Torque
control
loop
Position demand
internal value (60FCh)
Position unit
multiplier
(2301:1/2301:0)
Velocity unit
multiplier
(2302:1/2302:0)
Position Actual Value
(6064h)
Velocity Actual Value
(606Ch)
SERVOPACK
Machine
Serial
converter
(
´
256 or
´
512)
Pn22A
= n.0ooo
[pitch]
[inc]
Pn22A
= n.1ooo
FS
-
>S Unit
Multiplier
(Pn20A)
S
-
>FS Unit
Multiplier
(Pn20A)
+
+
FS
-
>S Unit
Multiplier
(Pn20A)
FS
-
>S Unit
Multiplier
(Pn20A)
Velocity offset or
Velocity demand value (606Bh)
Option Module
M
S FS
Fig. 373: Fully-closed Loop Control
Sigma-7 Series SERVOPACKs
PROFIdrive Drive Profile
Fully-closed Loop Control
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 519

 Loading...
Loading...







