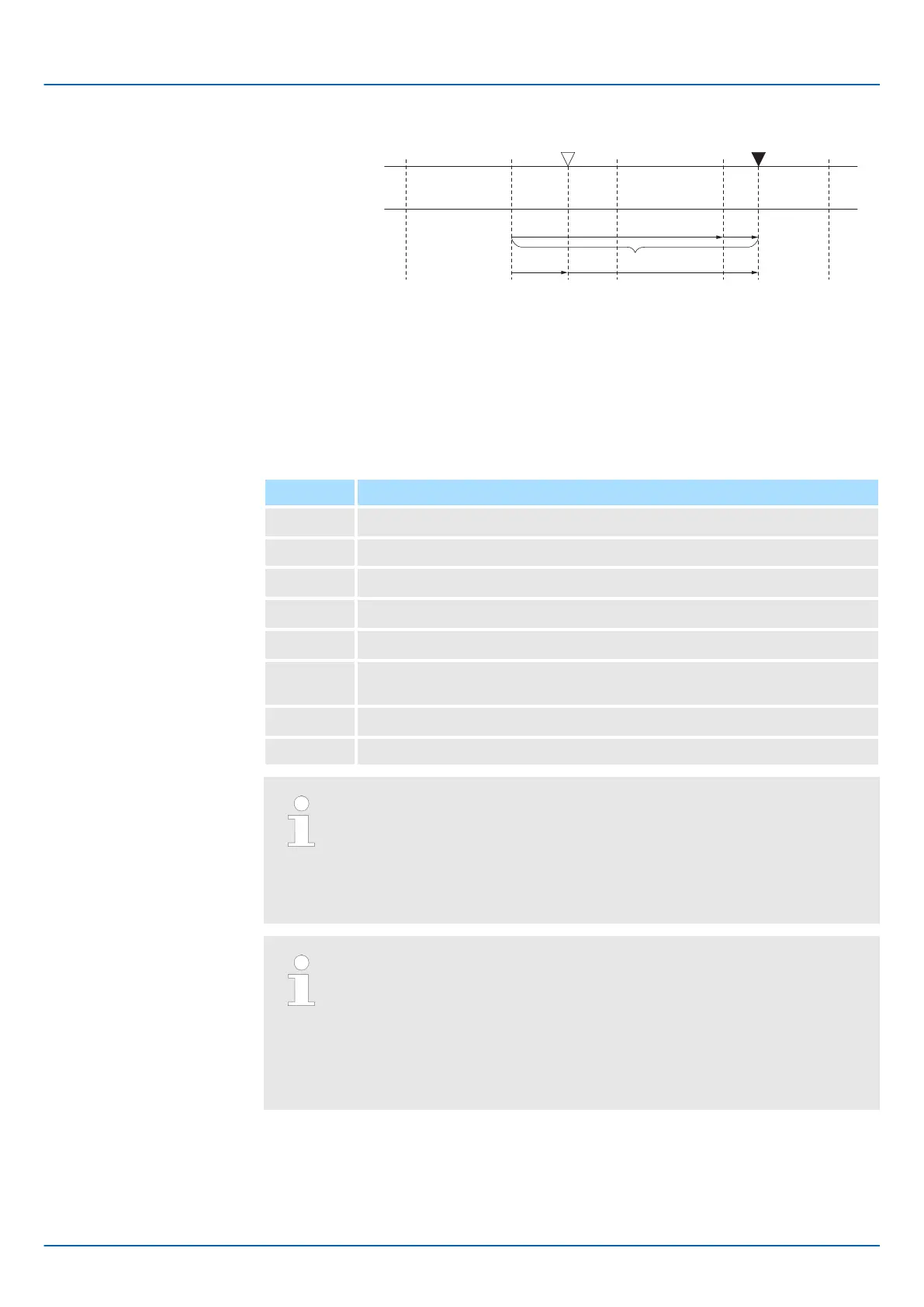
Machine coordinate
Value of
multiturn data
-1 0 +1 +2 +3
-1
±0
+1 +2
Origin (reference position) Current position
M × R
PE
PO
PS PM
Fig. 170: Calculating the Coordinate Value of the Present Position from the Origin of the
Machine
The current position P
M
in the machine coordinate system is calculated as follows:
P
M
= P
E
- P
S
P
E
= M × R + P
O
P
S
= M
S
× R + P
S
’
Symbol Meaning
P
E
Position data for the current position of the absolute encoder
M Current position of the multiturn data of the absolute encoder
P
O
Position of the current position within one rotation
P
S
Position data of the absolute encoder when absolute encoder was reset
M
S
Multiturn data of the absolute encoder when absolute encoder was reset
P
S
’ Position of the absolute encoder within one rotation when absolute
encoder was reset
P
M
Current position in machine coordinate system
R Pulses output per encoder rotation (value after dividing; setting of Pn212)
The following formulas apply in Reverse Rotation Mode (Pn000 =
n.
1).
P
M
= P
E
- P
S
P
E
= -M × R + P
O
P
S
= M
S
× R + P
S
’
– If you are using a Rotary Servomotor, you must reset the absolute
encoder. Refer to the following section for information on resetting the
absolute encoder.
Ä
Chap. 6.16 ‘Resetting the Absolute Encoder’ page 186
– You can set the origin to a different position from the reset position.
Refer to the following section for information on the origin position
offset.
Ä
Chap. 6.17 ‘Setting the Origin of the Absolute Encoder’ page 190
7.9.8 Multiturn Limit Setting
The multiturn limit is used in position control for a turntable or other rotating body.
Sigma-7 Series SERVOPACKs
Application Functions
Absolute Encoders > Multiturn Limit Setting
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 233

 Loading...
Loading...







