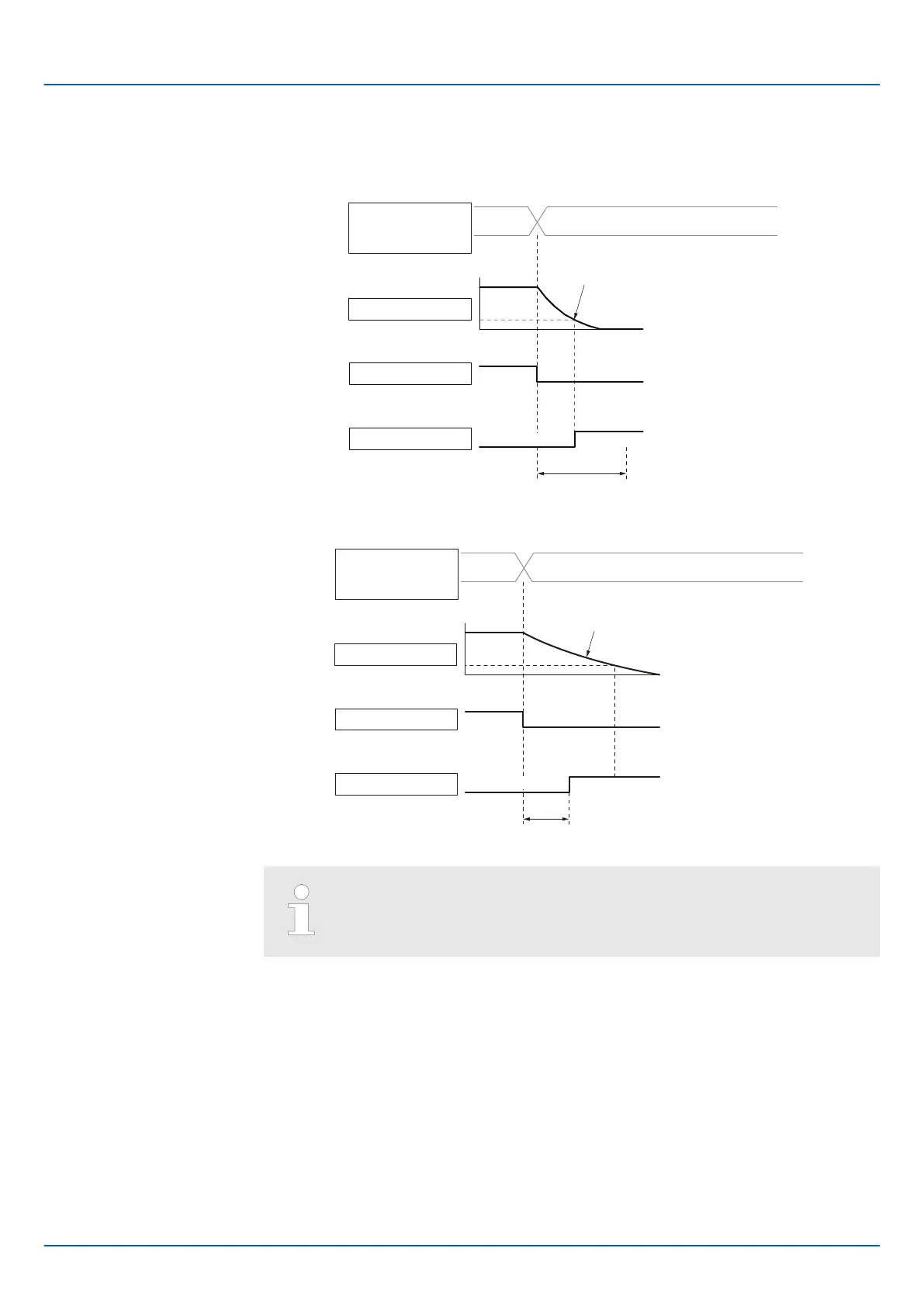
The brake operates when either of the following conditions is satisfied:
n When the Motor Speed Goes below the Level Set in Pn507 for a Rotary Servomotor
or in Pn583 for a Linear Servomotor after the Power Supply to the Motor Is Stopped
Enable
Operation
Disable
Operation
Controlword
(6040h), alarm,
or power OFF
Pn508
Motor speed
Motor power status
/BK signal
ON (Brake released.)
OFF (Brake applied.)
Power not
supplied.
Motor stopped with dynamic
brake or by coasting
(Pn001 = n.
oooX)
Rotary Servomotor: Pn507
Linear Servomotor: Pn583
Power
supplied.
Fig. 121: Brake Reference Output Speed Level
n When the Time Set In Pn508 Elapses after the Power Supply to the Motor Is Stopped
Enable
Operation
Disable
Operation
Controlword
(6040h), alarm,
or power OFF
Linear Servomotor: Pn583
Rotary Servomotor: Pn507
Motor stopped with dynamic
brake or by coasting
(Pn001 = n.
oooX)
Power
supplied.
Power not supplied.
OFF (Brake applied.)
Motor speed
Motor power status
/BK signal
Pn508
ON (Brake released.)
Fig. 122: Servo OFF-Brake Reference Waiting Time
The Servomotor will be limited to its maximum speed even if the brake
reference output speed level (Rotary Servomotor: Pn507, Linear Servo-
motor: Pn583) is higher than the maximum speed.
6.13 Motor Stopping Methods for Servo OFF and Alarms
6.13.1 Overview
You can use the following methods to stop the Servomotor when the servo is turned OFF
or an alarm occurs.
There are the following four stopping methods.
Sigma-7 Series SERVOPACKs
Basic Functions That Require Setting before Operation
Motor Stopping Methods for Servo OFF and Alarms > Overview
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 172

 Loading...
Loading...







