7.9.6 Transmission Specifications
The position data transmission specifications for the PAO (Encoder Divided Pulse Output)
signal are given in the following table.
The PAO signal sends only the multiturn data.
Refer to the following section for the timing of sending the position data from the absolute
encoder.
Ä
Chap. 7.9.5 ‘Reading the Position Data from the Absolute Encoder’ page 230
Item PAO signal
Synchronization Method Start-stop synchronization (ASYNC)
Baud Rate 9,600 bps
Start Bits 1 bit
Stop Bits 1 bit
Parity Even
Character Code ASCII, 7 bits
Data Format Refer to Data Format of PAO Signal.
Data Output Period Only once after the control power supply is turned ON
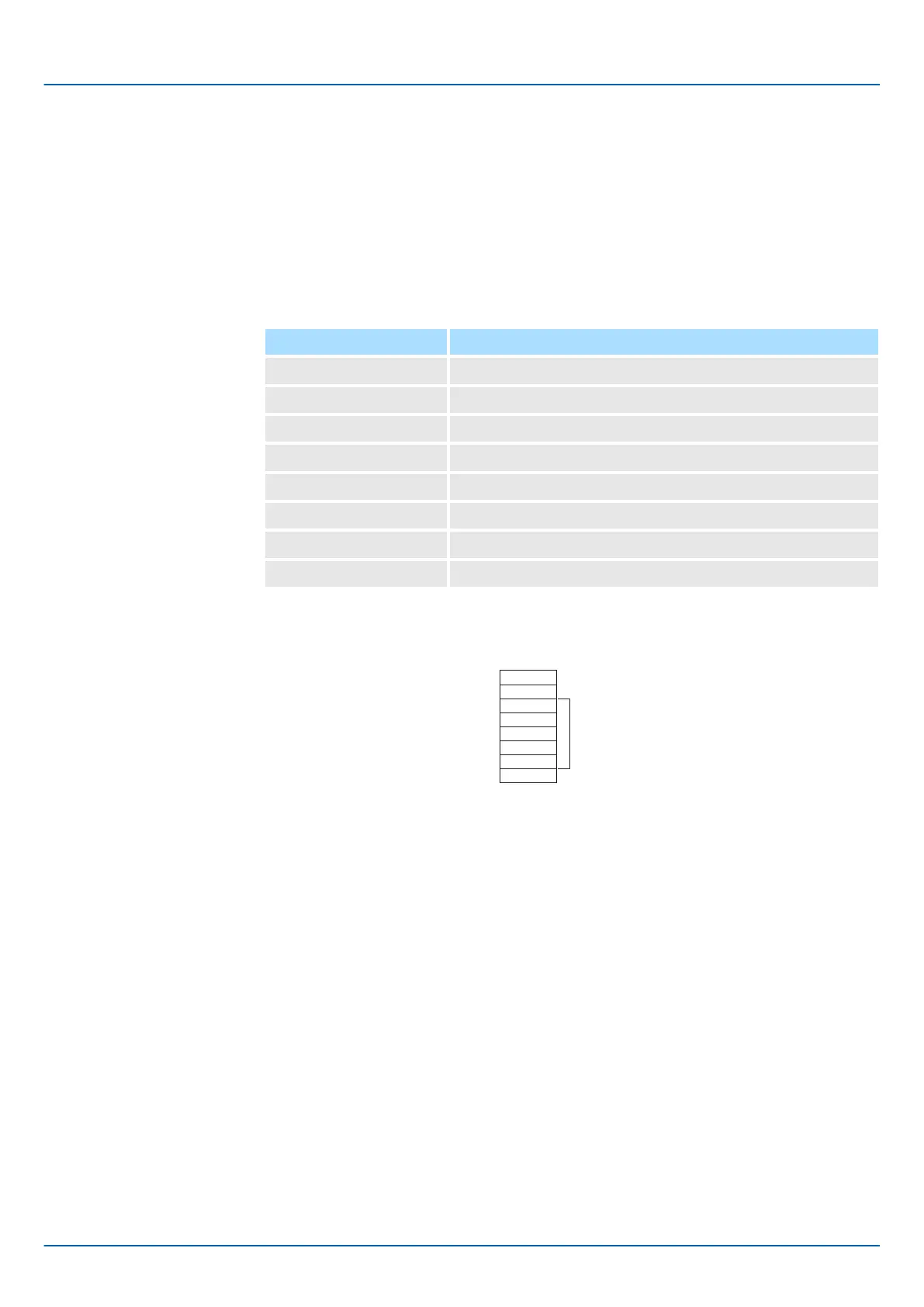
As shown below, the message format consists of eight characters: “P,” the sign, the 5-
digit multiturn data, and “CR” (which indicates the end of the message).
P
+ or −
0 to 9
0 to 9
0 to 9
0 to 9
0 to 9
CR
Multiturn
data (5 digits)
Fig. 169: Message Format of PAO Signal
7.9.7 Calculating the Current Position in Machine Coordinates
When you reset the absolute encoder, the reset position becomes the reference position.
The host controller reads the coordinate Ps from the origin of the encoder coordinate
system. The host controller must record the value of coordinate Ps.
This section describes the reference position in the machine coordinate system.
The method to calculate the coordinate value of the present position from the origin of the
machine coordinate system is given below.
Data Format of PAO Signal
Sigma-7 Series SERVOPACKs
Application Functions
Absolute Encoders > Calculating the Current Position in Machine Coordinates
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 232

 Loading...
Loading...







