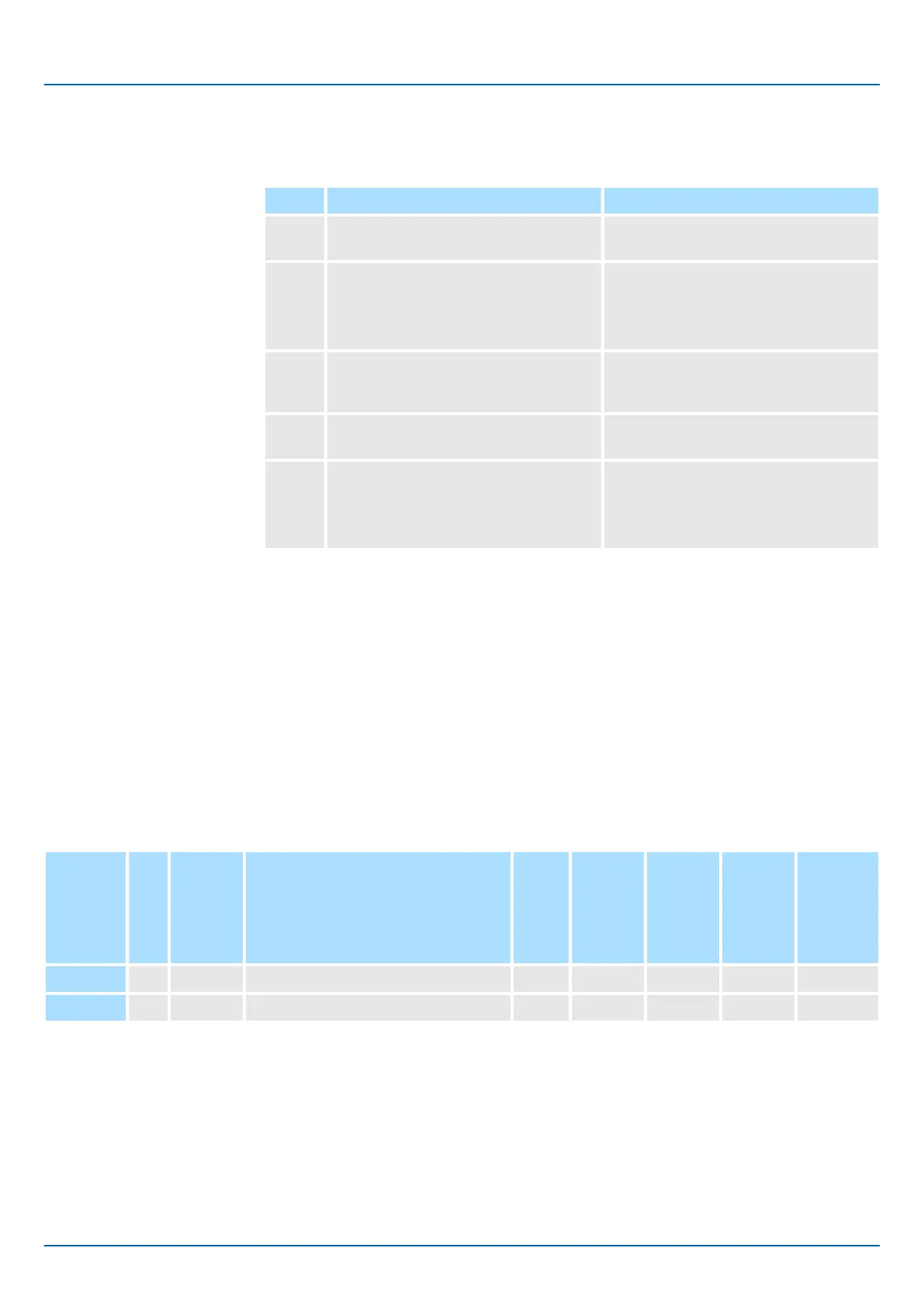
The basic setting procedure for the related parameters is given in the following table.
Step Description Parameter Setting
1 Set the speed feedback method to
use during fully-closed loop control.
Fully-closed Control Selections
(Pn22A)
2 Set the motor rotation direction. Rotation Direction Selection (Pn000 =
n.X)
External Encoder Usage (Pn002 =
n.X)
3 Set the number of pitches (cycles) of
the sine wave for the external
encoder.
Number of External Scale Pitches
(Pn20A)
4 Set the position reference unit (elec-
tronic gear).
Position User Unit (2301h)
5 Set the alarm detection level for the
external encoder.
Motor-Load Position Deviation Over-
flow Detection Level (Pn51B)
Multiplier per Fully-closed Rotation
(Pn52A)
14.11 Get/Set SERVOPACK Parameter Functionality
Internal SERVOPACK parameters (Pn)
Ä
Chap. 17.2.2 ‘List of Parameters’
page 661 can be read or written with PROFINET Communications.
Reading internal Servo parameter. In order to read SERVOPACK parameter do the fol-
lowing:
n Write parameter number to object "Get Parameter - Parameter Identify" (2100h)
n Read the value from object "Get Parameter - Parameter Value" (2101h)
Index
(hex)
Sub
Pn No.
Name
Access
PDO Mapping
Default value
Units
Type
2100h 0 Get Parameter - Parameter Identify RW No FFFFh - UINT
2101h 0 Get Parameter - Parameter Value RO No 0 - DINT
Setting / Writing internal Servo parameter. In order to set Servo parameter do the fol-
lowing:
n Write parameter number to object "Set Parameter - Parameter Identify" (2102h)
n Write the value into object "Set Parameter - Parameter Value" (2103h)
Setting Parameters
Get SERVOPACK Param-
eter
Related Objects
Set SERVOPACK Param-
eter
Sigma-7 Series SERVOPACKs
PROFIdrive Drive Profile
Get/Set SERVOPACK Parameter Functionality
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 520

 Loading...
Loading...







