Emergency Stop Torque
Setting
Range
Setting Unit Default Set-
ting
When Ena-
bled
Classifica-
tion
Pn406 0 to 800 1%* 800 Immediately Setup
(applies to Speed Control and Position Control)
* Set a percentage of the motor rated torque.
To specify the Servomotor deceleration time and use it to stop the Servomotor, set Pn30A
(Deceleration Time for Servo OFF and Forced Stops).
Deceleration Time for Servo OFF and Forced Stops
Setting
Range
Setting Unit Default Set-
ting
When Ena-
bled
Classifica-
tion
Pn30A 0 to 10,000 1 ms 0 Immediately Setup
(applies to Speed Control and Position Control)
If you set Pn30A to 0, the Servomotor will be stopped with a zero speed.
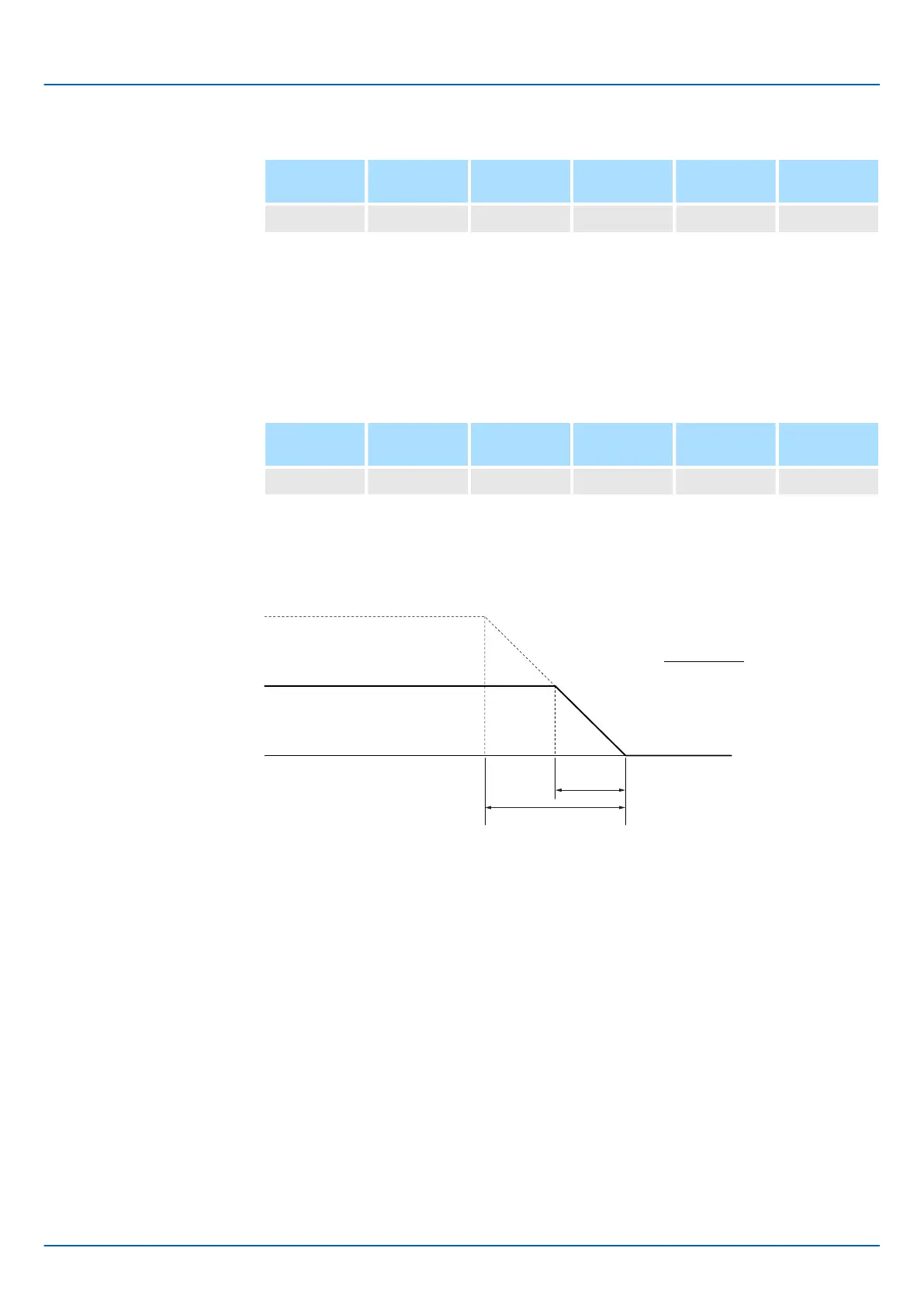
The deceleration time that you set in Pn30A is the time to decelerate the motor from the
maximum motor speed.
Pn30A
=
Maximum speed
Operating speed
Actual
deceleration time
Actual deceleration time
Operating speed
Maximum speed
× Deceleration time (Pn30A)
Fig. 114: Stopping the Servomotor by Setting the Deceleration Time
6.11.5 Overtravel Warnings
You can set the system to detect an A.9A0 warning (Overtravel) if overtravel occurs while
the servo is ON. This allows the SERVOPACK to notify the host controller with a warning
even when the overtravel signal is input only momentarily. An alarm occurs only if over-
travel occurs while the servo is ON. An overtravel warning will not be detected when the
servo is OFF, even if overtravel occurs.
Stopping the Servomotor
by Setting the Decelera-
tion Time
Sigma-7 Series SERVOPACKs
Basic Functions That Require Setting before Operation
Overtravel and Related Settings > Overtravel Warnings
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 163

 Loading...
Loading...







