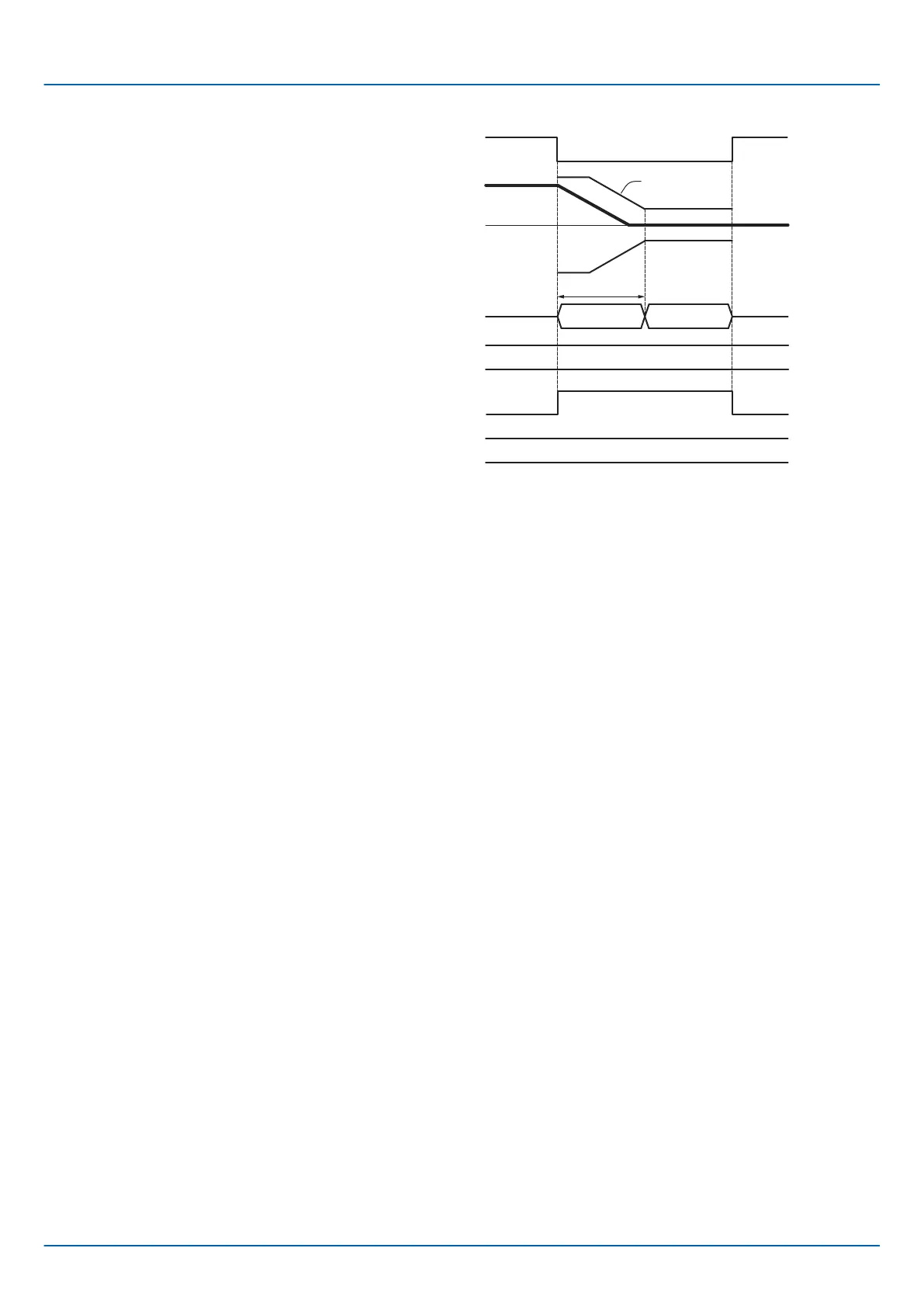
Safety request
input signal
Set time
SLS-D activation status
0
SERVOPACK status
Motor powered
Monitored
speed
Deceleration
monitoring
Constant speed
monitored.
ON ON
OFF (Safety function
execution requested.)
0 01
Statusword
(6041h)
Operation enabled
Safety active
(6041h, bit 15)
Velocity actual value
(606Ch)
Fig. 354: Operation Example for SLS-D
When the safety request input signal turns ON, normal operation will be enabled.
The recovery method after deceleration monitoring is completed and the safe (HWBB)
state is entered in the same as for the HWBB function. Refer to the following section for
details.
sd
Ä
Chap. 12.3.5 ‘Recovery Method’ page 470
12.8.5 Active Mode Function
The Active Mode Function stops the motor according to the deceleration reference that is
preset in a parameter in the SERVOPACK when the safety request input signal turns OFF
during SBB-D or SPM-D.
If Profile Torque Mode or Cyclic Synchronous Torque Mode is set in controlword (6040h,
bits 4 to 9), the servo will be turned OFF and the motor will be stopped as soon as the
safety request input signal turns OFF.
The motor is stopped at the set deceleration rate (Pn622 or Pn623). After the decelera-
tion monitor time (Pc11 or Pc21) elapses, the servo is turned OFF (Switch ON Disable
state is entered).
Operation Example for
SLS-D
Recovery Method
Active Mode Function
Operation Example
When Using the SBB-D
Function (Position or
Speed Control)
Sigma-7 Series SERVOPACKs
Safety Functions
Safety Module Safety Functions > Active Mode Function
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 480

 Loading...
Loading...







