NoteArticle numberEquipment, etc.
Content is defined in section Standard
toolkit on page 559.
-Standard toolkit
Attaching the lifting accessories
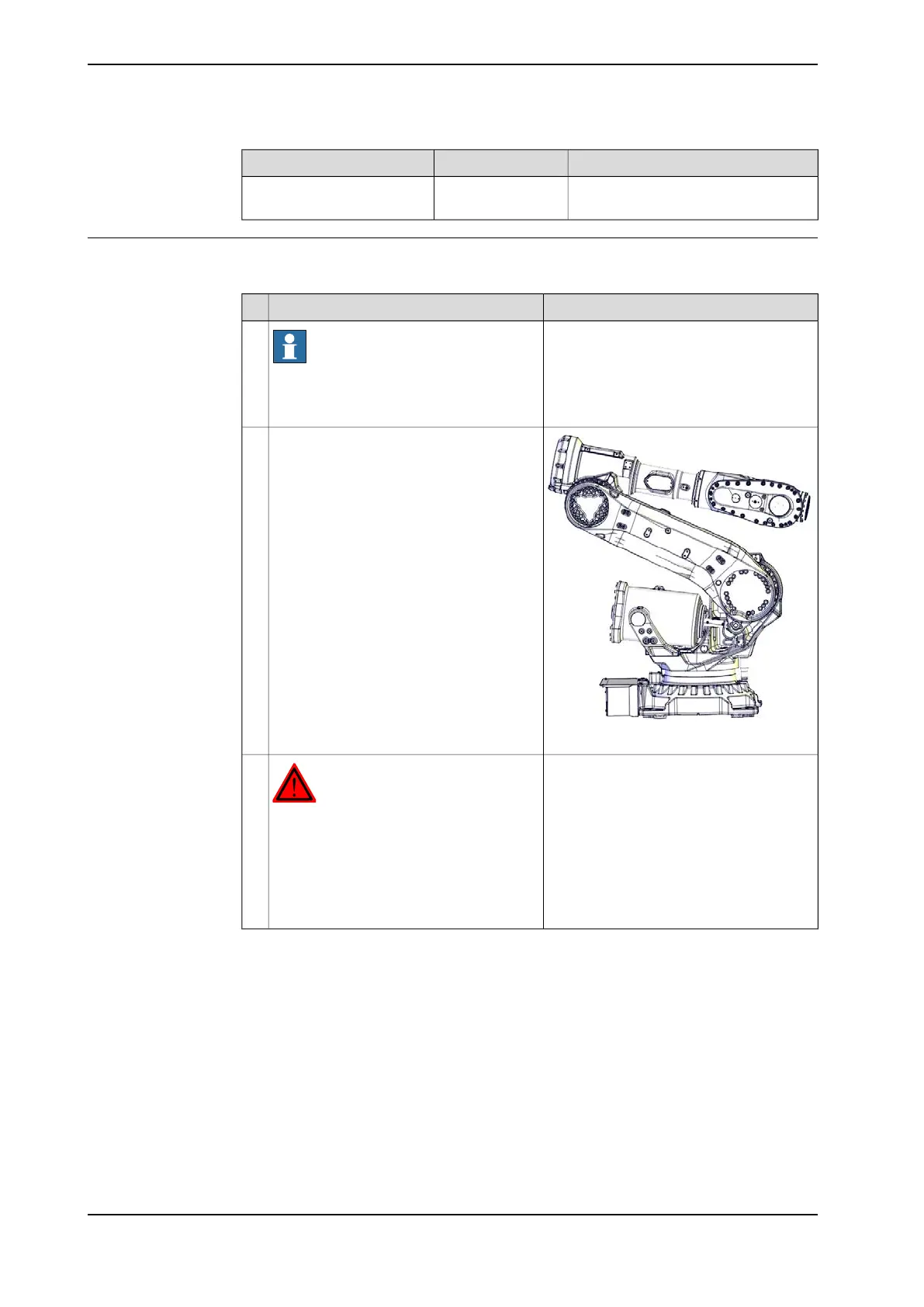
Robot position
NoteAction
Note
When jogging the axis-2 into position check
that the balancing device ear and the ear
on the lower arm is not colliding!
1
xx1200001250
Jog the robot into position:
• Axis-1: no significance as long as
the robot is secured to the founda-
tion
• Axis-2: -60°
• Axis-3: +70° (approximately)
• Axis-4: 0°
• Axis-5: 0°
• Axis-6: 0°.
2
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot
working area.
3
Continues on next page
184 3HAC044266-001 Revision: -
© Copyright 2013 ABB. All rights reserved.
4 Repair
4.3.2 Lower and upper arm unseparated
Continued
 Loading...
Loading...







