NoteAction
Jog the robot into position:
• Axis 1: no significance (as long as
the robot is secured to the founda-
tion)
• Axis 2: -60°
• Axis 3: +60°
• Axis 4: +90°
• Axis 5: +90°
• Axis 6: no significance
6
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot
working area.
7
Prepare a pallet with cardboard in front of
the robot or where it is possible, to be used
for putting down the wrist unit on.
8
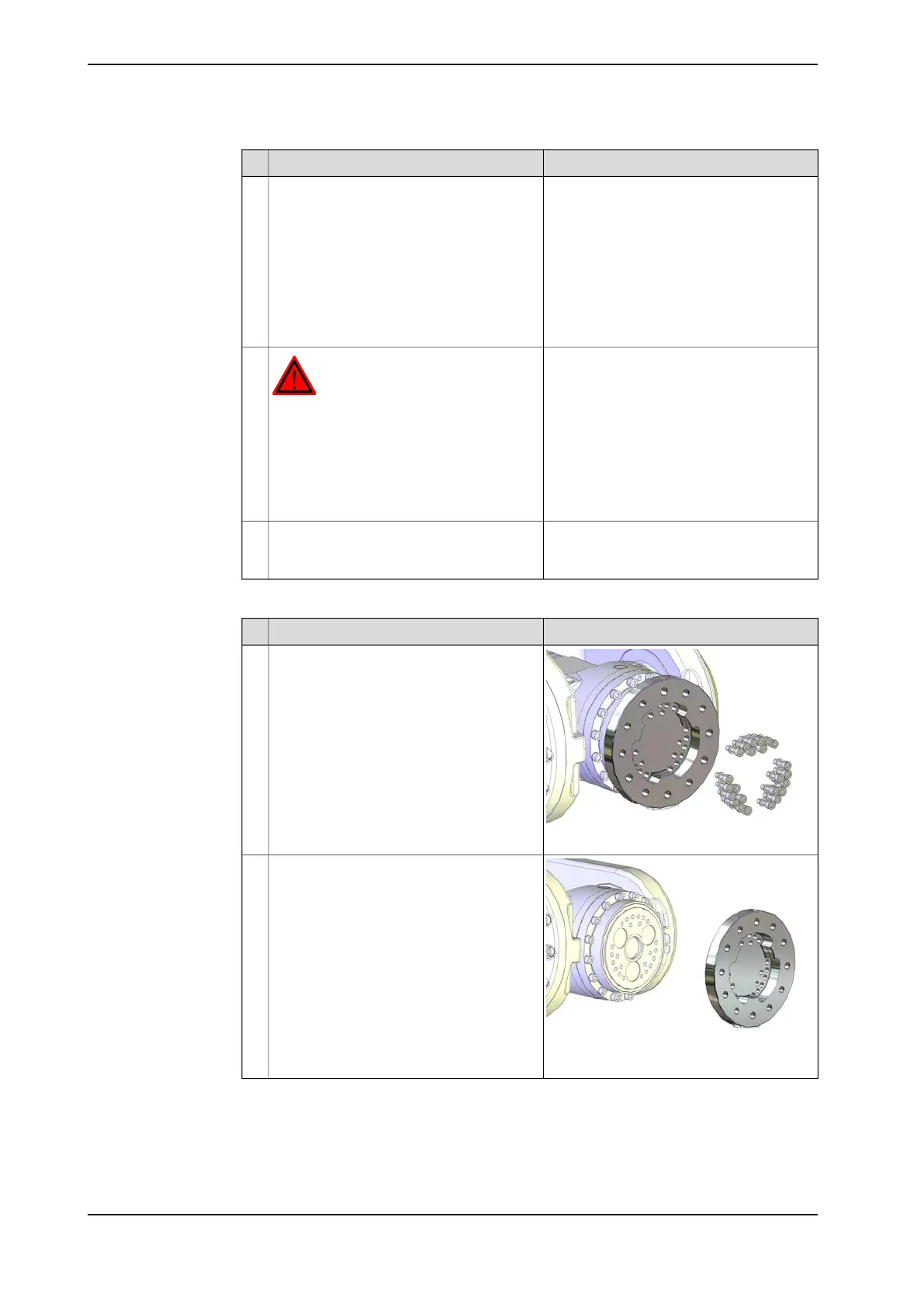
Removing the turning disk
NoteAction
xx1300000492
Remove the attachment screws securing
the turning disk.
1
xx1300000493
Remove the turning disk.2
Continues on next page
276 3HAC044266-001 Revision: -
© Copyright 2013 ABB. All rights reserved.
4 Repair
4.5.2 Replacing the wrist
Continued