NoteArticle numberEquipment, etc.
Used for putting down removed parts
from robot.
Pallet
Always use guide pins in pairs!3HAC13120-2Guide pin, M16x150
Used to rotate the motor pinion.3HAC7887-1Rotation tool
Used to release the motor brakes.-24 VDC power supply
Included in the tool kit Dismantle and
mounting tool (3HAC028920-001).
3HAC047273-001Anvil
3HAC15716-1Calibration Pendulum toolkit
Content is defined in section Standard
toolkit on page 559.
-Standard toolkit
Consumables
NoteArt. no.Equipment, etc.
Optimol PD0, 50 ml3HAC042534-001Grease
For lubrication of the front
bearing of the balancing
device.
Used to lubricate o-rings.3HAB3537-1Grease
D=169.5x33HAB3772-111O-ring
Used on axis-3 motor cover.
D=119x33HAB3772-110
Used on axis-4 motor cover.
D=119x33HAB3772-110
Used on axis-5 motor cover.
Used on axis-6 motor cover.3HAC033489-001Gasket
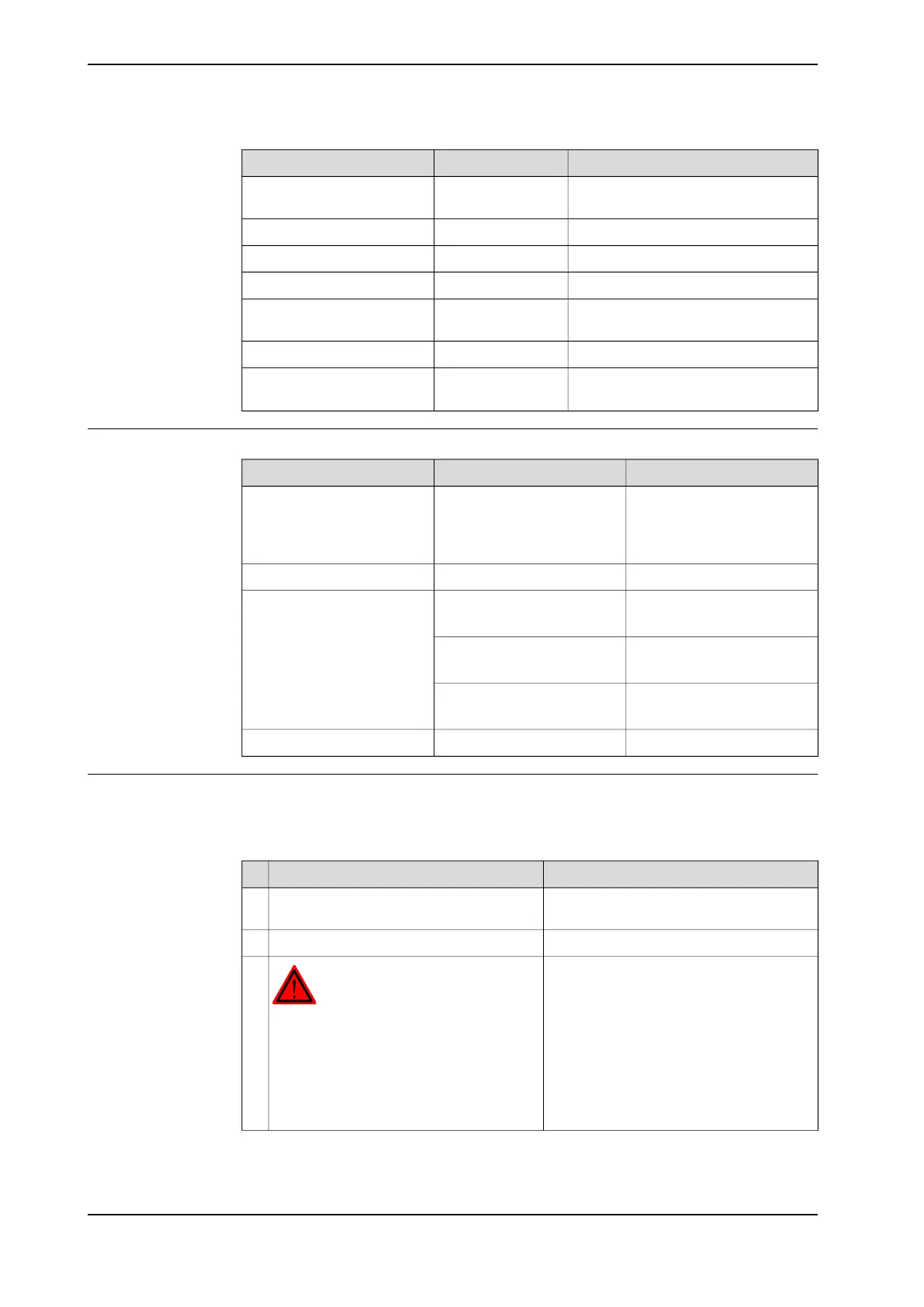
Removing the lower arm
Use these procedures to remove the lower arm.
Preparations
NoteAction
Remove all equipment fitted to upper and
lower arms.
1
Jog the robot to calibration position.2
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot
working area.
3
Continues on next page
298 3HAC044266-001 Revision: -
© Copyright 2013 ABB. All rights reserved.
4 Repair
4.5.4 Replacing the lower arm
Continued