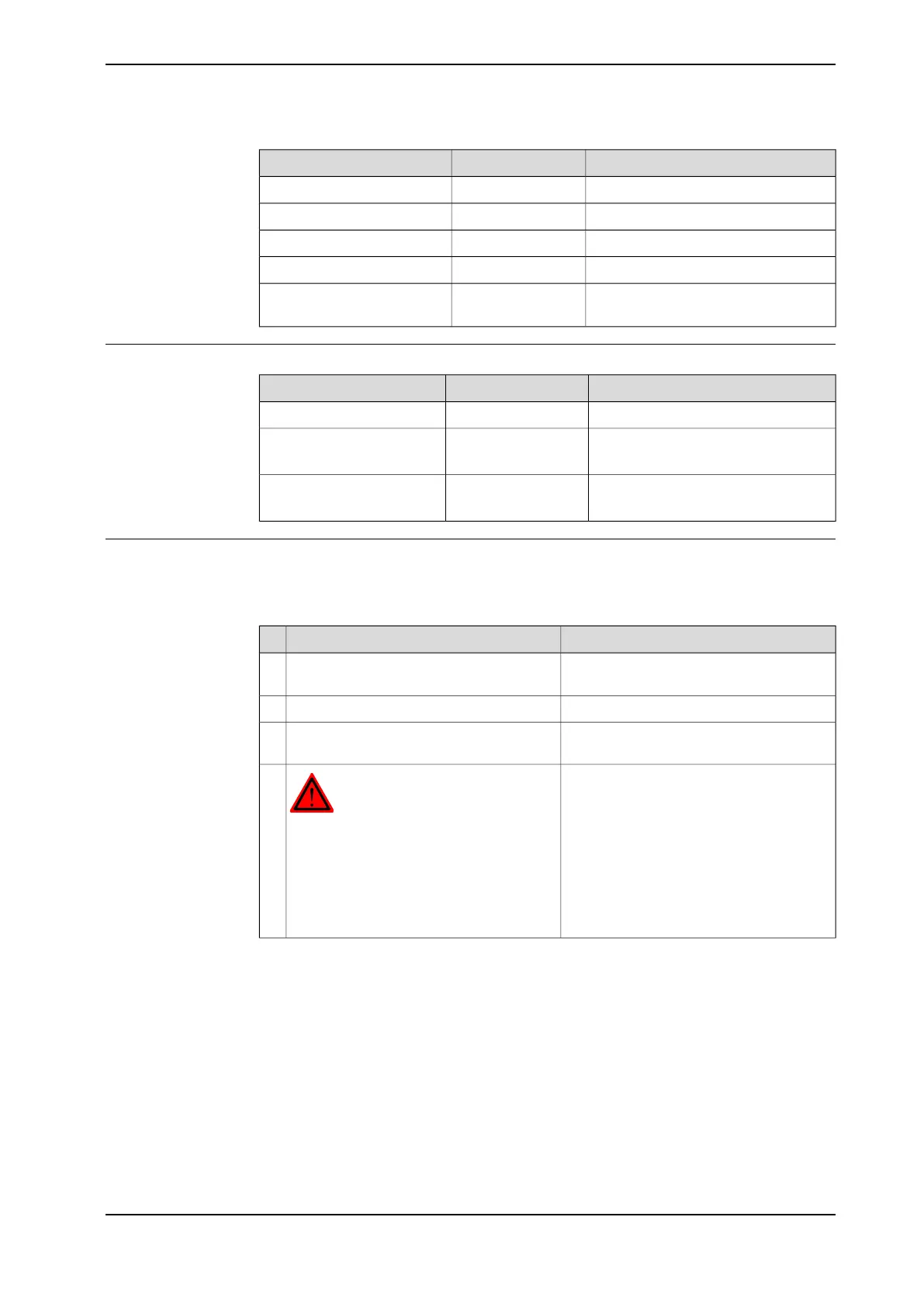
NoteArticle numberEquipment, etc.
Used to release the motor brakes.-24 VDC power supply
Used to secure lower arm.-Lock screw, M16x120
3HAC0207-1Leak-down tester
3HAC15716-1Calibration Pendulum toolkit
Content is defined in section Standard
toolkit on page 559.
-Standard toolkit
Consumables
NoteArticle numberEquipment, etc.
Used to lubricate o-rings.3HAB3537-1Grease
D=169.5x33HAB3772-111O-ring
Used on motor cover.
D=102x33HAB3772-107O-ring
Used on motor flange.
Removing the motor
These procedures describes how to remove the motor.
Preparations
NoteAction
See Draining the axis-2 gearbox on
page 144.
Drain the oil from the gearbox.1
Jog the robot to the calibration position.2
If needed adjust the position of axis-2 to
make it possible to insert the lock screw.
3
DANGER
Secure the weight of the lower arm with a
lock screw, before releasing the brakes on
the axis-2 motor as well as before removing
the axis-2 motor or the axis-2 gearbox.
4
The lock screw is used to secure the weight
of the lower arm, in order to avoid acci-
dents or damage.
Continues on next page
3HAC044266-001 Revision: - 397
© Copyright 2013 ABB. All rights reserved.
4 Repair
4.7.2 Replacing the axis-2 motor
Continued