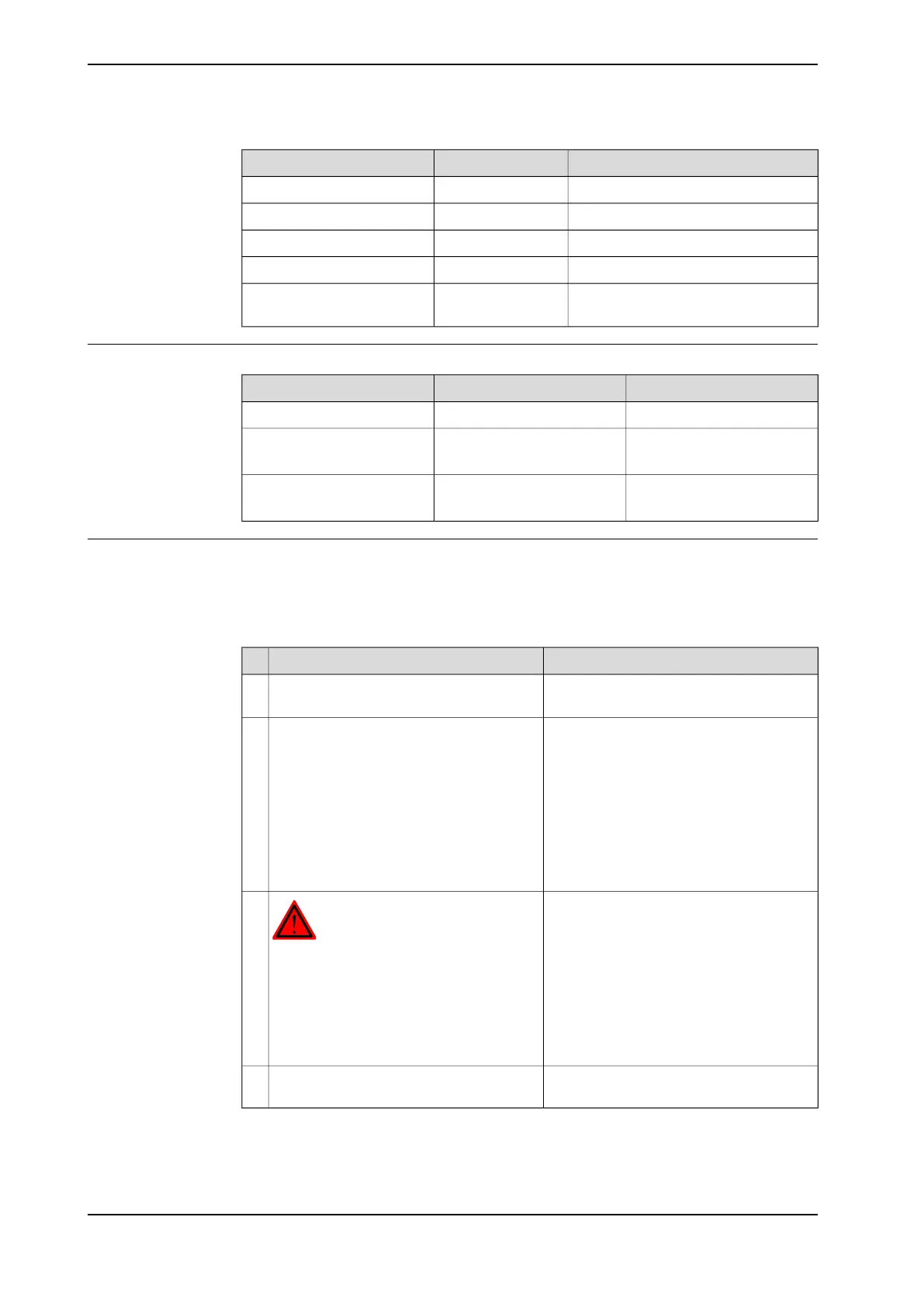
NoteArticle numberEquipment, etc.
Used to rotate the motor pinion.3HAC7887-1Rotation tool
Used to release the motor brakes.-24 VDC power supply
3HAC0207-1Leak-down tester
3HAC15716-1Calibration Pendulum toolkit
Content is defined in section Standard
toolkit on page 559.
-Standard toolkit
Consumables
NoteArticle numberEquipment, etc.
Used to lubricate o-rings.3HAB3537-1Grease
D=169.5x33HAB3772-111O-ring
Used on motor cover.
D=102x33HAB3772-107O-ring
Used on motor flange.
Removing the motor
These procedures describes how to remove the motor.
Preparations
Use this procedure to do the necessary preparations before removing the motor.
NoteAction
See Draining the axis-3 gearbox on
page 149.
Drain the axis-3 gearbox.1
Unload the upper arm using one of these
methods:
• Use caution and jog axis-3 to maxim-
um + position. Release the brakes
and let the upper arm rest against
the axis-3 damper.
• Use a fork lift to rest the upper arm
onto it
• Use lifting slings and an overhead
crane to rest the upper arm
2
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot
working area.
3
Remove any equipment hindering access
to the motor.
4
Continues on next page
408 3HAC044266-001 Revision: -
© Copyright 2013 ABB. All rights reserved.
4 Repair
4.7.3 Replacing the axis-3 motor
Continued