NoteArt. no.Equipment
Content is defined in section Standard
toolkit on page 559.
-Standard toolkit
Lifting the robot with fork lift
This procedure details how to secure the fork lift set in order to lift the robot and
move it using fork lift ONLY!
NoteAction
Release the brakes if required as detailed in the
section Manually releasing the brakes on page 82.
Move robot to its shipping position!
Note
No load is permitted on the robot!
1
DANGER
Turn off all:
• electric power supply to the
robot
• hydraulic pressure supply to
the robot
• air pressure supply to the
robot
Before entering the robot working
area.
2
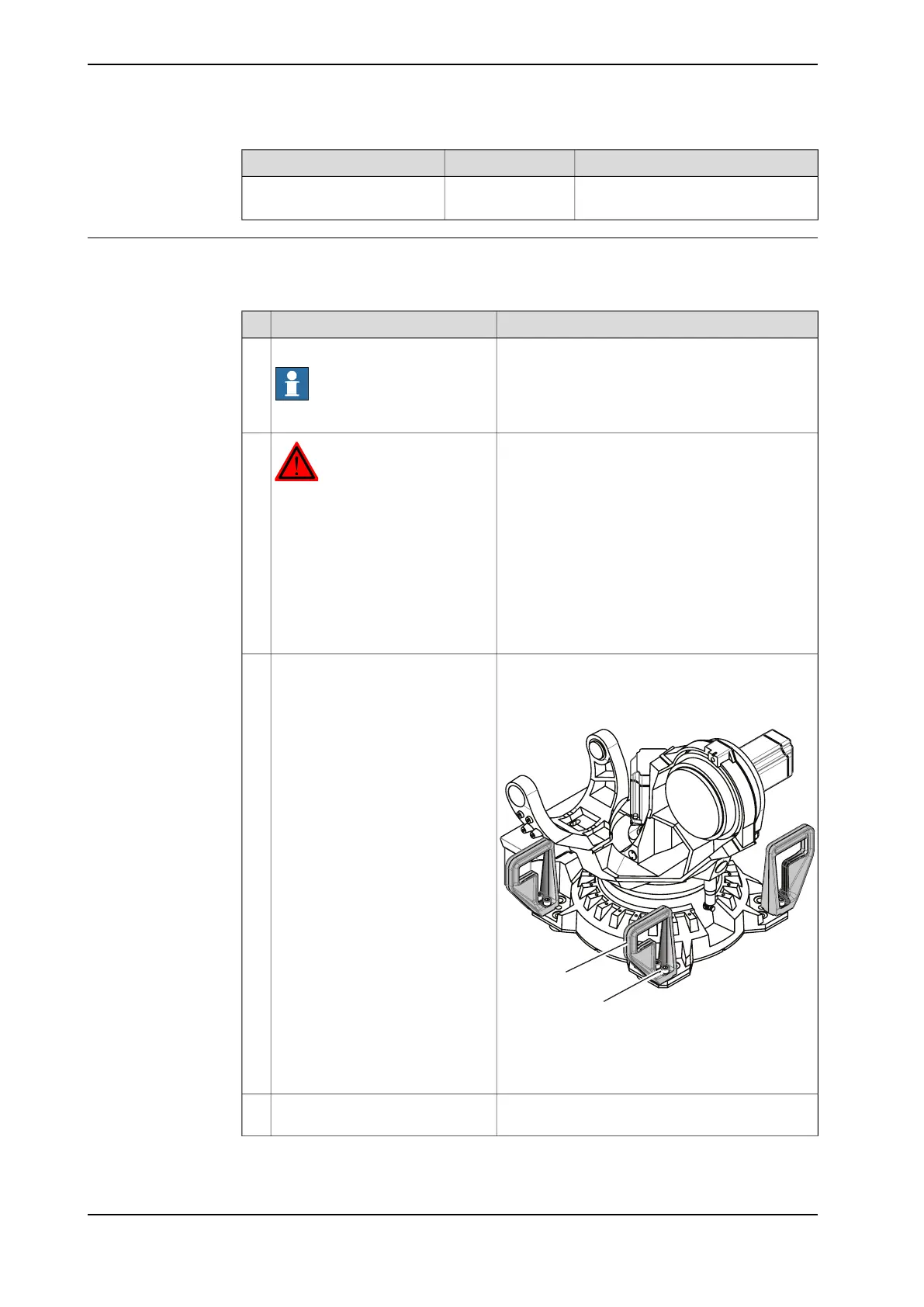
Tightening torque: 280 Nm.Fit the four fork lift pockets on the
base of the robot with its attach-
ment screws.
3
Make sure the original screws are always used (or
replacements of equivalent quality: M20x60, quality
8.8)!
xx1300001602
A Fork lift pocket
B Attachment screw M20x60 quality 8.8 (2 pcs
x 4).
Insert fork lift forks into the pock-
ets.
4
Continues on next page
70 3HAC044266-001 Revision: -
© Copyright 2013 ABB. All rights reserved.
2 Installation and commissioning
2.4.1 Lifting robot with fork lift
Continued