PID loops and tuning
11.1 PID loop definition table
S7-200 SMART
System Manual, 09/2015, A5E03822230-AC
469
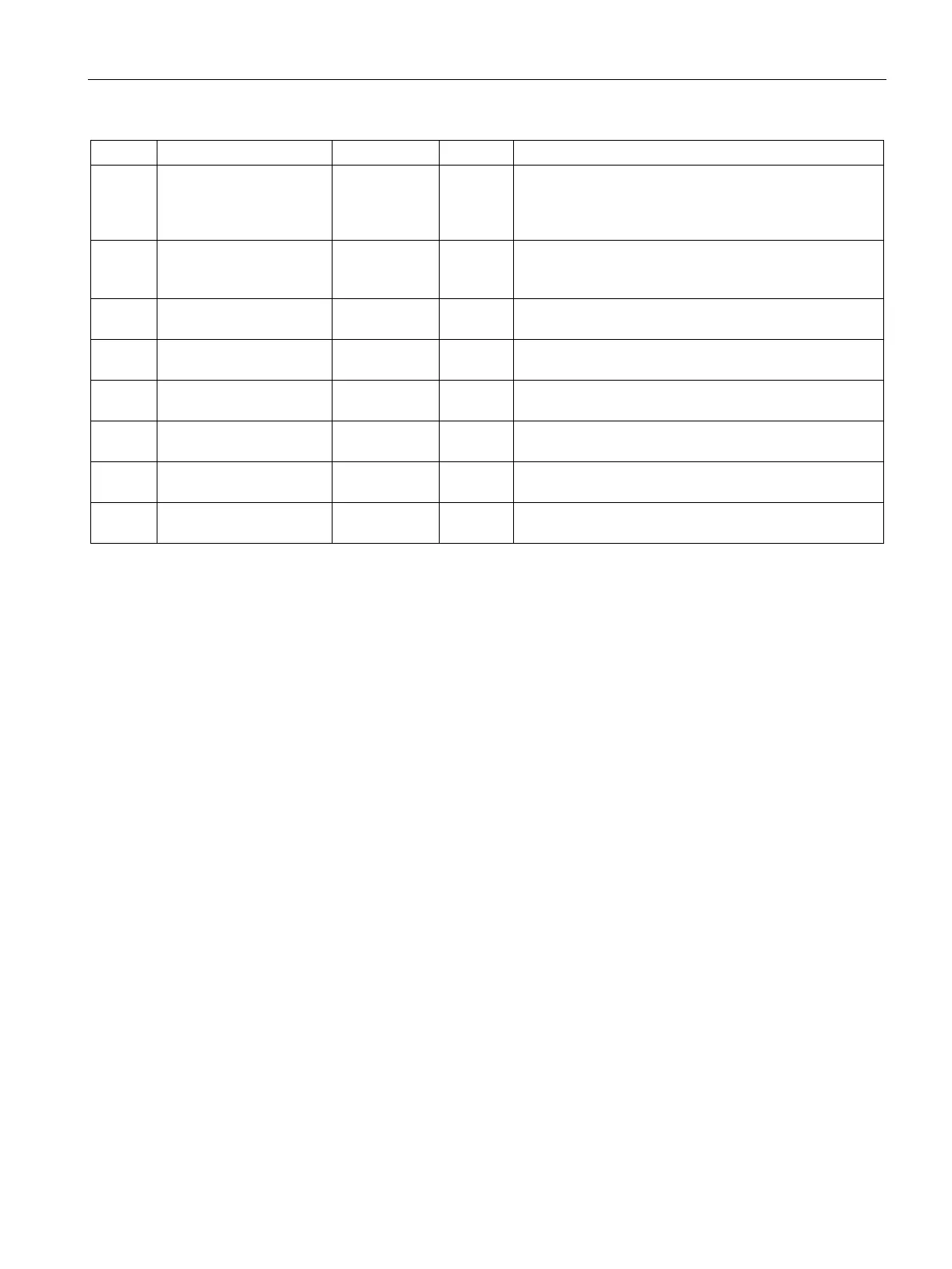
48 Hysteresis (HYS) REAL In Normalized value of the PV hysteresis used to deter-
mine zero crossings (range: 0.005 to 0.1). If the ratio of
DEV to HYS is less than 4, a warning will be indicated
52 Initial Output Step
(STEP)
REAL In Normalized size of the step change in the output value
used to induce oscillations in the PV (range: 0.05 to
56 Watchdog Time (WDOG) REAL In Maximum time allowed between zero crossings in sec-
onds (range: 60 to 7200).
60 Suggested Gain (AT_K
C
) REAL Out Suggested loop gain as determined by the auto-tune
64 Suggested Integral Time
I
REAL Out Suggested integral time as determined by the auto-tune
68 Suggested Derivative
REAL Out Suggested derivative time as determined by the auto-
72 Actual Step size
REAL Out Normalized output step size value as determined by the
76 Actual Hysteresis
REAL Out Normalized PV hysteresis value as determined by the

 Loading...
Loading...










