Open loop motion control
12.6 Subroutines created by the Motion wizard for the Axis of Motion
S7-200 SMART
506 System Manual, 09/2015, A5E03822230-AC
Subroutines created by the Motion wizard for the Axis of Motion
You must ensure for each motion action that only one motion subroutine is active at a time in
addition to the AXISx_CTRL, which must be active every scan. Each motion subroutine is
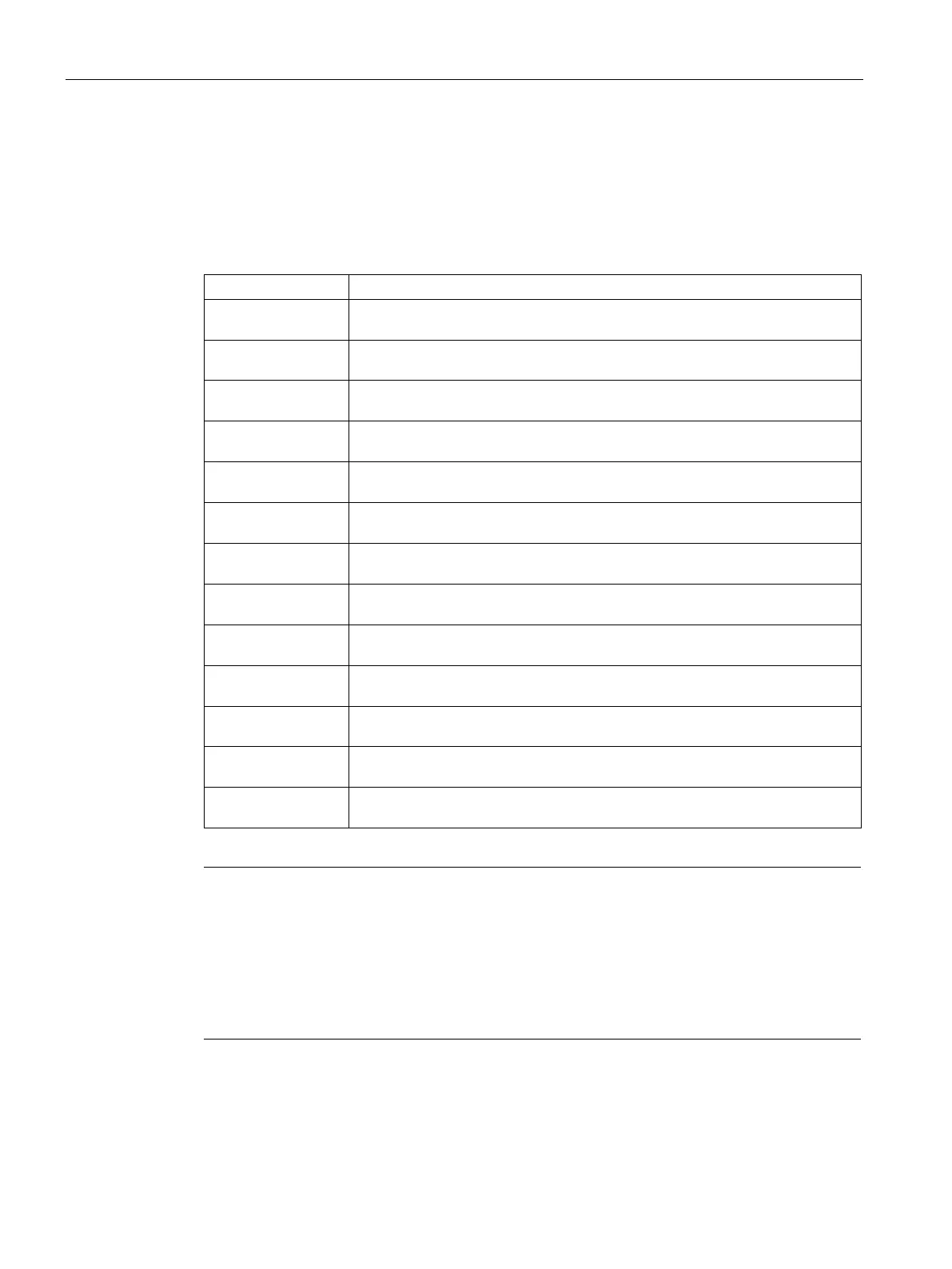
prefixed with an "AXISx_" where "x" is the axis number channel. There are 13 motion
subroutines.
AXISx_CTRL
Provides initialization and overall control of the axis
AXISx_MAN
(Page 509)
Used for manual mode operation of the axis
AXISx_GOTO
Commands the axis to go to a specified location
AXISx_RUN
Commands the axis to execute a configured motion profile
AXISx_RSEEK
Initiates a reference point seek operation
AXISx_LDOFF
Establishes a new zero position that is offset from the reference point position
AXISx_LDPOS
Changes the axis position to a new value
AXISx_SRATE
Modifies the configured acceleration, deceleration, and jerk compensation
AXISx_DIS
Controls the DIS output
AXISx_CFG
Reads the configuration block and updates the axis setup as required
AXISx_CACHE
Pre-caches a configured motion profile
AXISx_RDPOS
Returns the current axis position
AXISx_ABSPOS
Reads the absolute position value from a SINAMICS V90 servo drive
Note
The motion subroutines increase the
amount of memory required for your program by up to
bytes. You can delete unused motion subroutines to reduce the amount of memory
required. To prevent the generation of unneeded motion subroutines, uncheck the
"Generate" box for each unneeded subrout
ine in the "Components" node of the Motion
wizard. To restore generation of a particular motion subroutine, start the Motion wizard
again, navigate to the "Components" node, and check the "Generate" box for the subroutine.
Click the "Generate" button to re
build the wizard-generated subroutines.
Using the Motion wizard (Page 481)

 Loading...
Loading...










