Open loop motion control
12.2 Using motion control
S7-200 SMART
486 System Manual, 09/2015, A5E03822230-AC
Motor data sheets have different ways of specifying the start/stop (or pull-in/pull-out) speed
for a motor and given load. Typically, a useful SS_SPEED value is 5% to 15% of the
MAX_SPEED value. To help you select the correct speeds for your application, refer to the
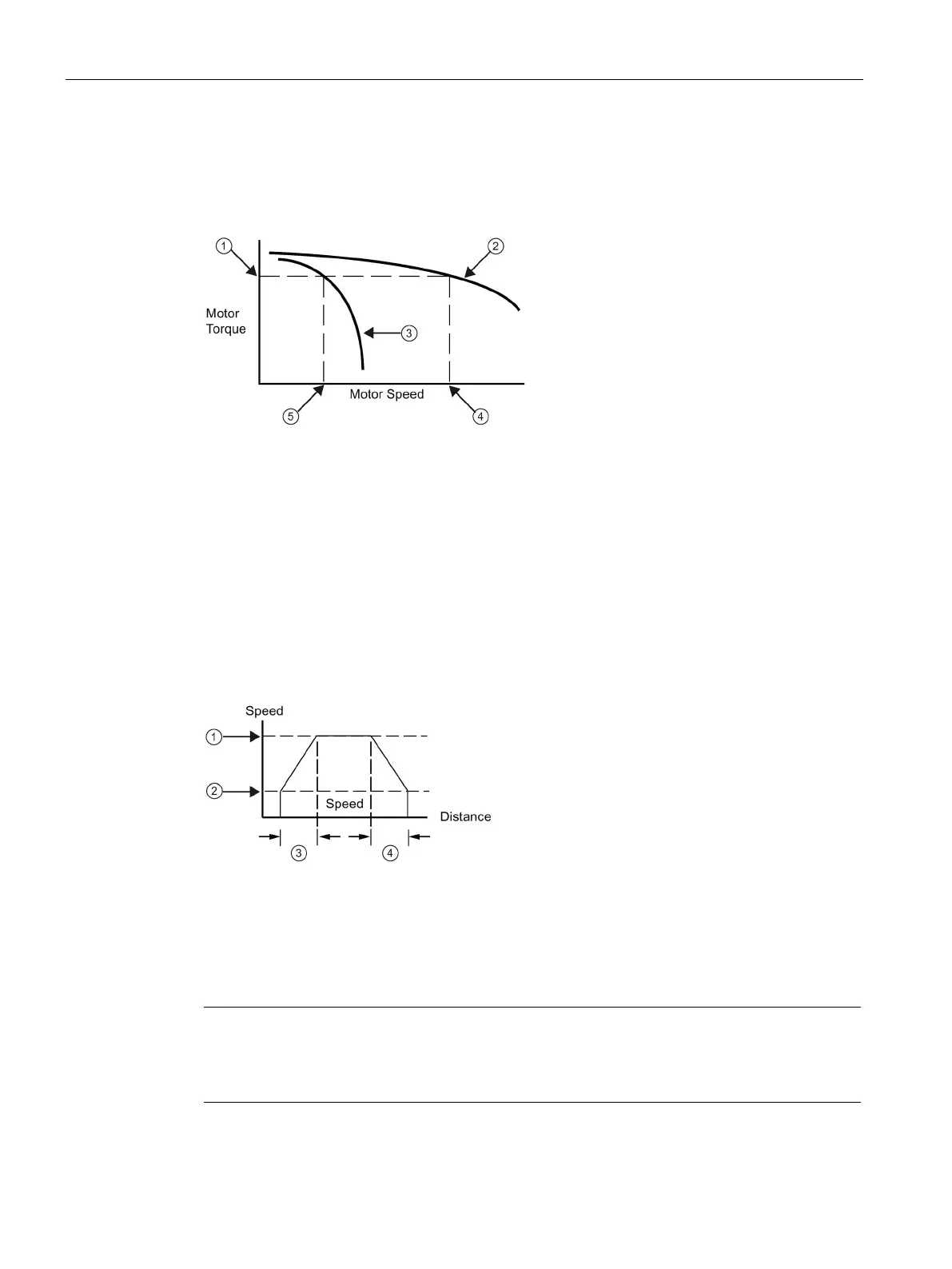
data sheet for your motor. The following figure shows a typical motor torque/speed curve.
Torque required to drive the load
Motor torque versus speed characteristic
Start/Stop speed versus torque: This curve moves towards lower speed as the load inertia
Maximum speed that the motor can drive the load: MAX_SPEED should not exceed this value.
Start/Stop speed (SS_SPEED) for this load
Entering the acceleration and deceleration times
As part of the configuration, you set the
acceleration and deceleration times. The
default setting for bot
h the acceleration
time and the deceleration time is 1 se
c-
ond. Typically, motors can work with
less than 1 second. See the following
figure.
① MAX_SPEED
② SS_SPEED
③ ACCEL_TIME
④ DECEL_TIME
Note
Motor acceleration and deceleration times are determined by trial and error. You should start
by entering a large value. Optimize these settings for the application by gradually reducing
the times until the motor starts to stall.

 Loading...
Loading...










