Open loop motion control
12.6 Subroutines created by the Motion wizard for the Axis of Motion
S7-200 SMART
510 System Manual, 09/2015, A5E03822230-AC
The Speed parameter determines the speed when RUN is enabled. If you configured the
measuring system of the Axis of Motion for pulses, the speed is a DINT value for
pulses/second. If you configured the measuring system of the Axis of Motion for engineering
units, the speed is a REAL value for units/second. You can change this parameter while the
motor is running.
Note
The Axis of Motion may not react to small changes in the
Speed parameter, especially if the
configured acceleration or deceleration time is short and the difference between the
configured maximum speed and start/stop speed is large.
The Dir parameter determines the direction to move when RUN is enabled. You cannot
change this value when the RUN parameter is enabled.
The Error parameter (Page 545) contains the result of this subroutine.
The C_Pos parameter contains the current position of the Axis of Motion. Based upon the
units of measurement selected, the value is either a number of pulses (DINT) or the number
of engineering units (REAL).
The C_Speed parameter contains the current speed of the Axis of Motion. Based upon the
units of measurement selected, the value is either the number of pulses/second (DINT) or
the engineering units/second (REAL).
The C_Dir parameter indicates the current direction of the motor:
● Signal state of 0 = positive
● Signal state of 1 = negative
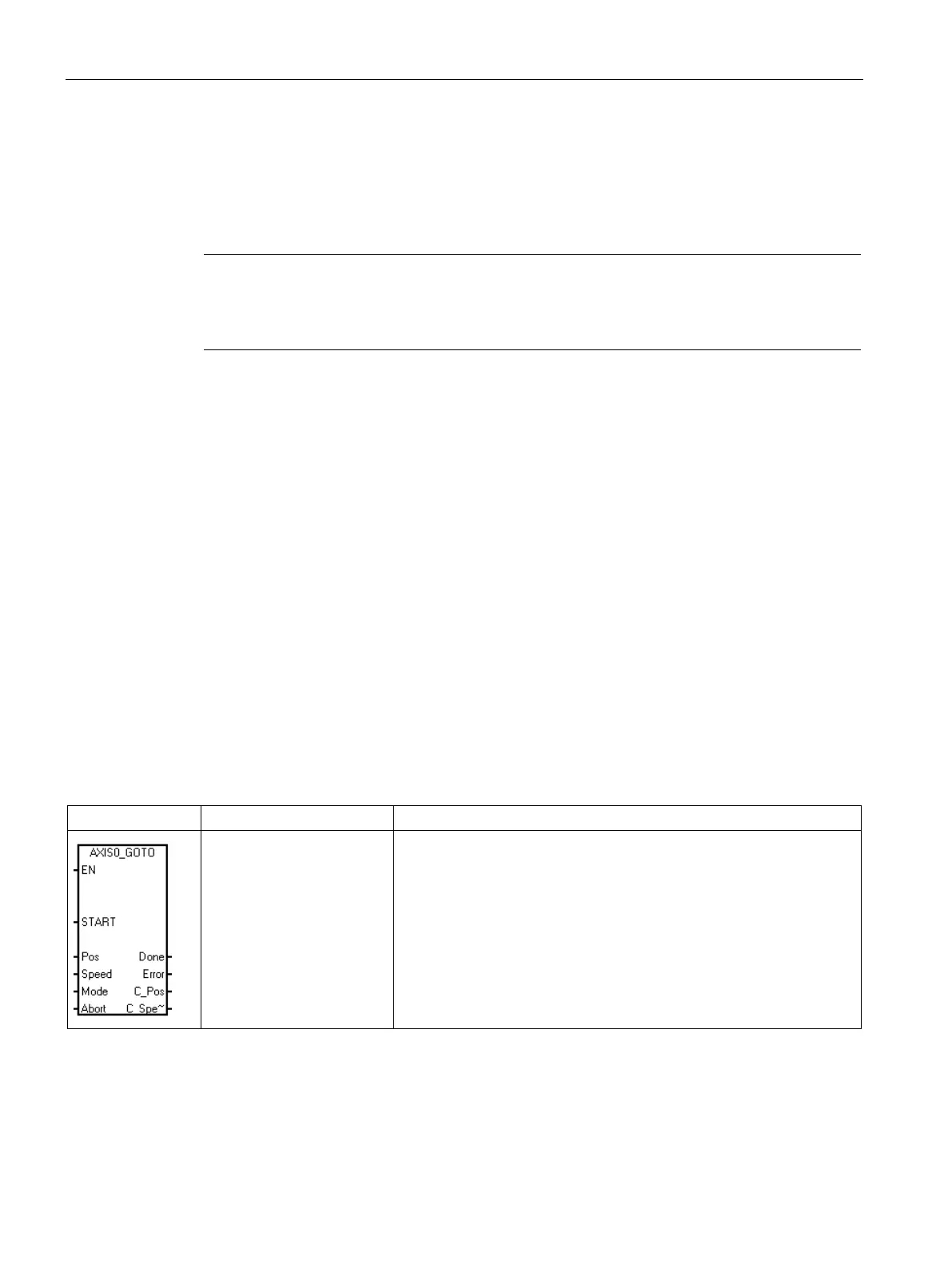
Table 12- 10 AXISx_GOTO
START, Pos, Speed,
Mode, Abort, Done,
Error, C_Pos,
C_Speed
The AXISx_GOTO subroutine commands the Axis of Motion to go to a
desired location.
 Loading...
Loading...











