Libraries
9.2 USS library instructions
S7-200 SMART
422 System Manual, 09/2015, A5E03822230-AC
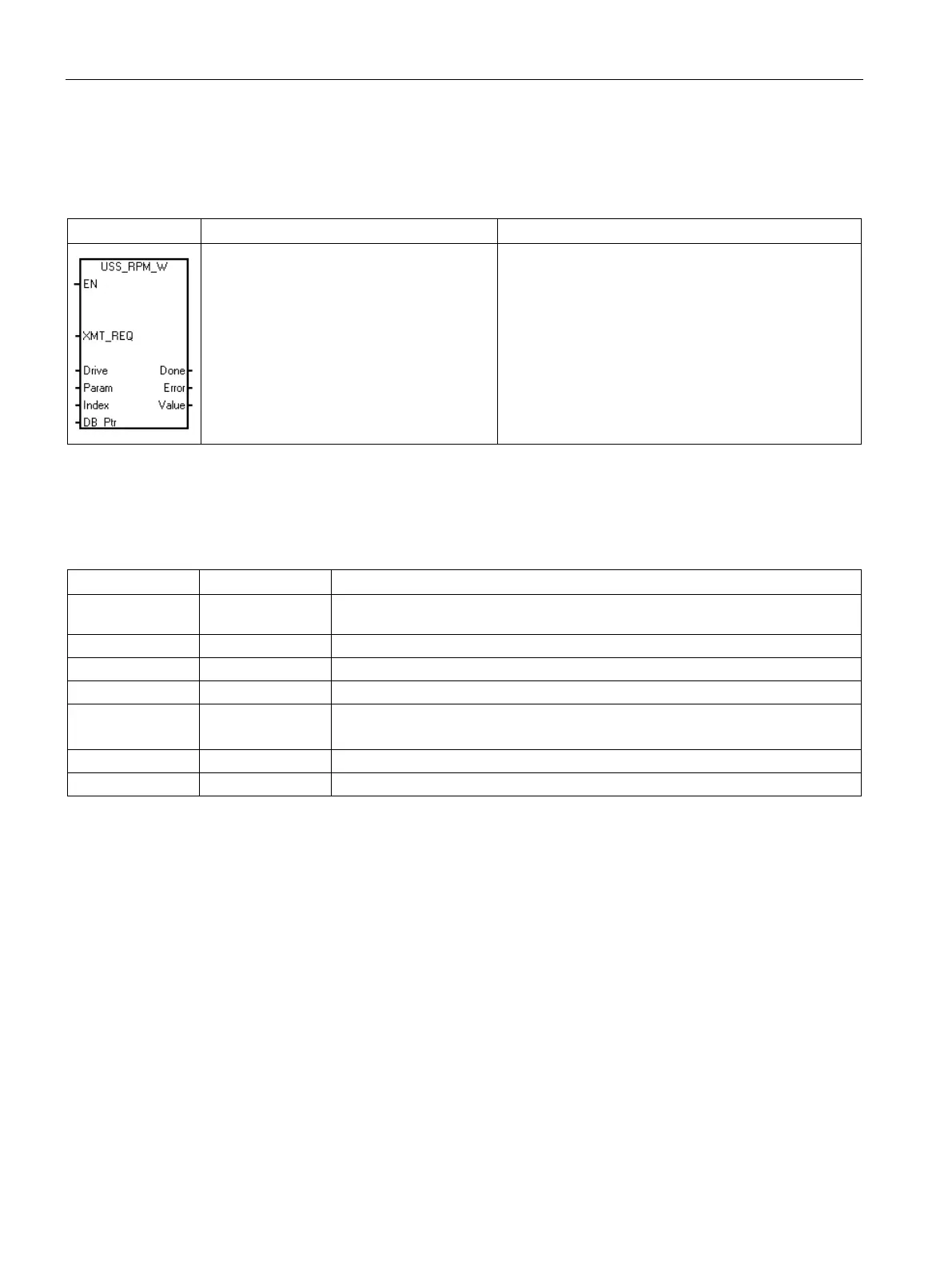
Table 9- 10 USS_RPM_x instructions
CALL USS_RPM_W, XMIT_REQ, Drive,
Param, Index, DB_Ptr, Done, Er-
ror, Value
CALL USS_RPM_D, XMIT_REQ, Drive,
Param, Index, DB_Ptr, Done, Er-
ror, Value
CALL USS_RPM_R, XMIT_REQ, Drive,
Param, Index, DB_Ptr, Done, Er-
ror, Value
There are three read instructions for the USS protocol:
• USS_RPM_W instruction reads an unsigned word
parameter.
• USS_RPM_D instruction reads an unsigned double
word parameter.
• USS_RPM_R instruction reads a floating-point
parameter.
• Only one read (USS_RPM_x) or write
(USS_WPM_x) instruction can be active at a time.
The USS_RPM_x transactions complete when the drive acknowledges receipt of the
command or when an error condition is posted. The logic scan continues to execute while
this process awaits a response.
Table 9- 11 Valid operands for the USS_RPM_x instructions
XMT_REQ BOOL I, Q, M, S, SM, T, C, V, L, Power Flow conditioned by a rising edge detection
element
VB, IB, QB, MB, SB, SMB, LB, AC, *VD, *AC, *LD, Constant
Param, Index WORD VW, IW, QW, MW, SW, SMW, LW, T, C, AC, AIW, *VD, *AC, *LD, Constant
Value WORD
VW, IW, QW, MW, SW, SMW, LW, T, C, AC, AQW, *VD, *AC, *LD
VD, ID, QD, MD, SD, SMD, LD, *VD, *AC, *LD
I, Q, M, S, SM, T, C, V, L
VB, IB, QB, MB, SB, SMB, LB, AC. *VD, *AC, *LD
The "EN" bit must be on to enable transmission of a request, and should remain on until the
"Done" bit is set, signaling completion of the process. For example, a USS_RPM_x request
is transmitted to the drive on each scan when the "XMT_REQ" input is on. Therefore, the
"XMT_REQ" input should be pulsed on through an edge detection element which causes
one request to be transmitted for each positive transition of the "EN" input.
 Loading...
Loading...











