PID loops and tuning
11.5 Exception conditions
S7-200 SMART
System Manual, 09/2015, A5E03822230-AC
475
Exception conditions
Warning conditions
Tuning execution can generate three warning conditions. Tuning execution reports these
warnings in three bits of the ASTAT field of the loop table, and, once set, these bits remain
set until the next auto-tune sequence is initiated:
● Warning 0: Generated if the deviation value is not at least 4X greater than the hysteresis
value. This check is performed when the hysteresis value is actually known, which
depends upon the auto-hysteresis setting.
● Warning 1: Generated if there is more than an 8X difference between the two peak error
values gathered during the first 2.5 cycles of the auto-tune procedure
● Warning 2: Generated if the measured average peak error is not at least 4X greater than
the hysteresis value
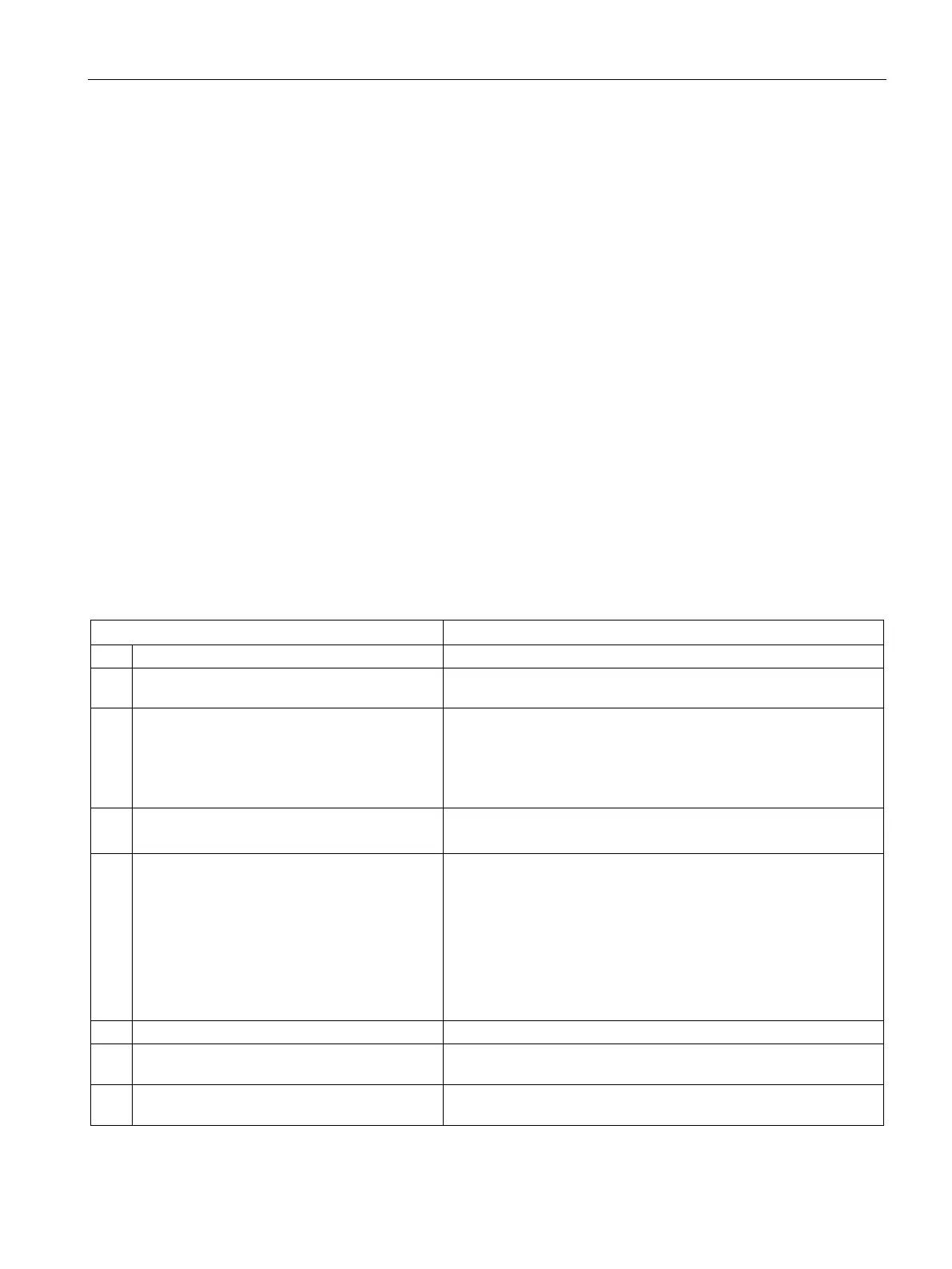
In addition to the warning conditions, several error conditions are possible. The following
table lists the error conditions, along with a description of the cause of each error.
Table 11- 3 Error conditions during tuning execution
EN bit cleared while tuning is in progress
02 aborted due to a zero-crossing watchdog
timeout
Half-cycle elapsed time exceeds zero-crossing watchdog interval
03 aborted due to the process out-of-range PV goes out-of-range:
• during the auto-hysteresis sequence, or
• twice before the fourth zero-crossing, or
• after the fourth zero crossing
04 aborted due to hysteresis value exceeding
maximum
User-specified hysteresis value, or
automatically determined hysteresis value > maximum
05 aborted due to illegal configuration value The following range checking errors:
• Initial loop output value is < 0.0 or > 1.0
• User-specified deviation value is <= hysteresis value, or is >
maximum
• Initial output step is <= 0.0 or is > maximum
• Zero-crossing watchdog interval time is < minimum
• Sample time value in loop table is negative
aborted due to a numeric error
Illegal floating point number or divide by zero encountered
07 PID instruction was executed with no power
PID instruction executed with no power flow while auto-tuning is in
08 auto-tuning allowed only for P, PI, PD, or PID
Loop type is not P, PI, PD, or PID

 Loading...
Loading...










