If there is noise or if the gain does not increase, better results may be obtained
by changing the rigidity type. Select the type according to the following guide-
lines.
n 1: Belt mechanism
Tuning is performed for a mechanism with relatively low rigidity, e.g., a belt.
n 2: Ball screw mechanism or Linear motor
Tuning is performed for a mechanism with relatively high rigidity, e.g., a ball
screw or Linear Servomotor. Use this setting if there is no other appropriate
setting.
n 3: Rigid body system
Tuning is performed for a mechanism with high rigidity, e.g., a rigid body
system.
The tuning modes that you can select depend on the SERVO-
PACK setting.
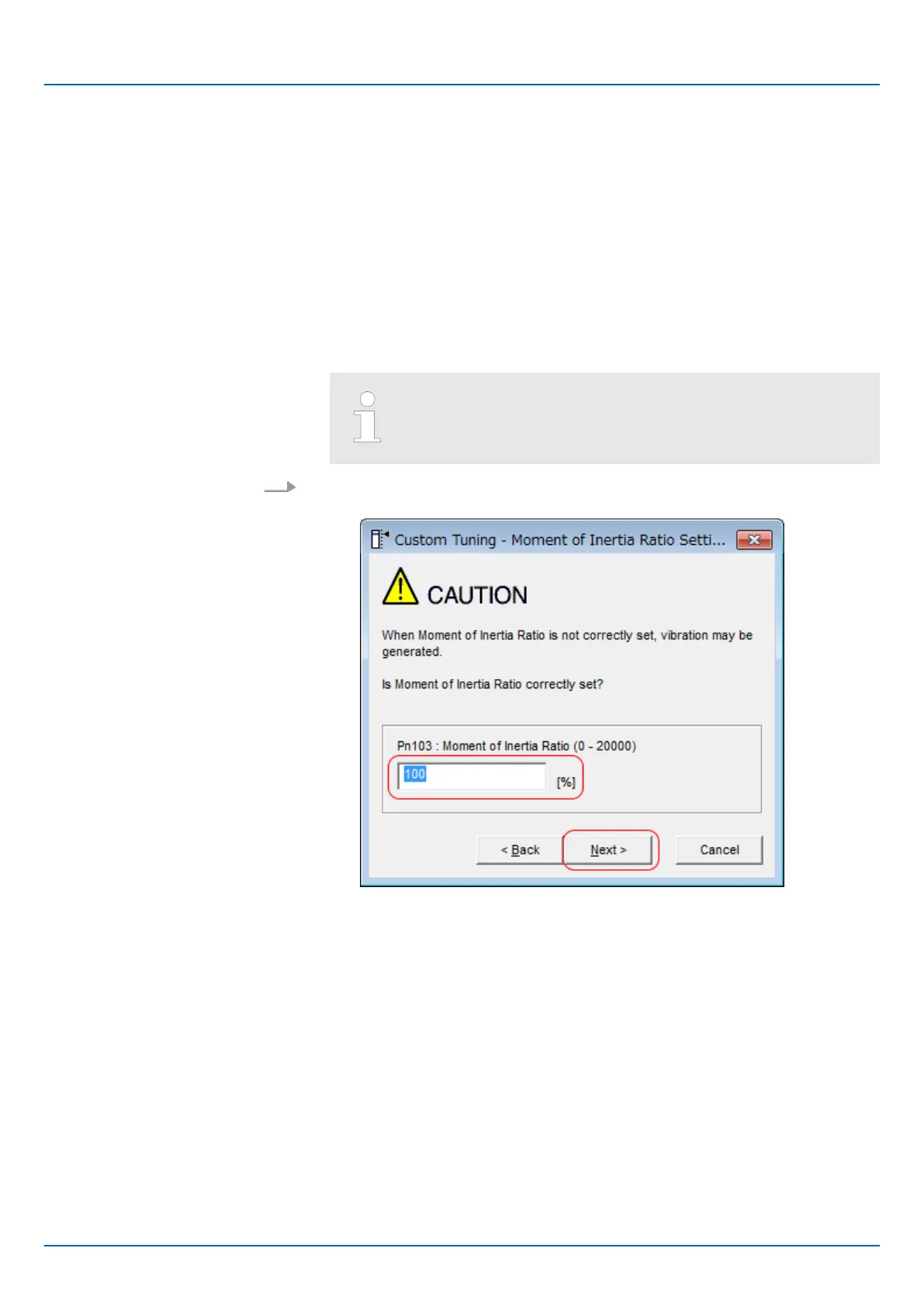
8. If the moment of inertia ratio is not set correctly, correct the setting and then click
the Next Button.
Fig. 262: Custom Tuning - Moment of Inertia Ratio Setting
Sigma-7 Series SERVOPACKs
Tuning
Custom Tuning > Operating Procedure
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 356

 Loading...
Loading...







