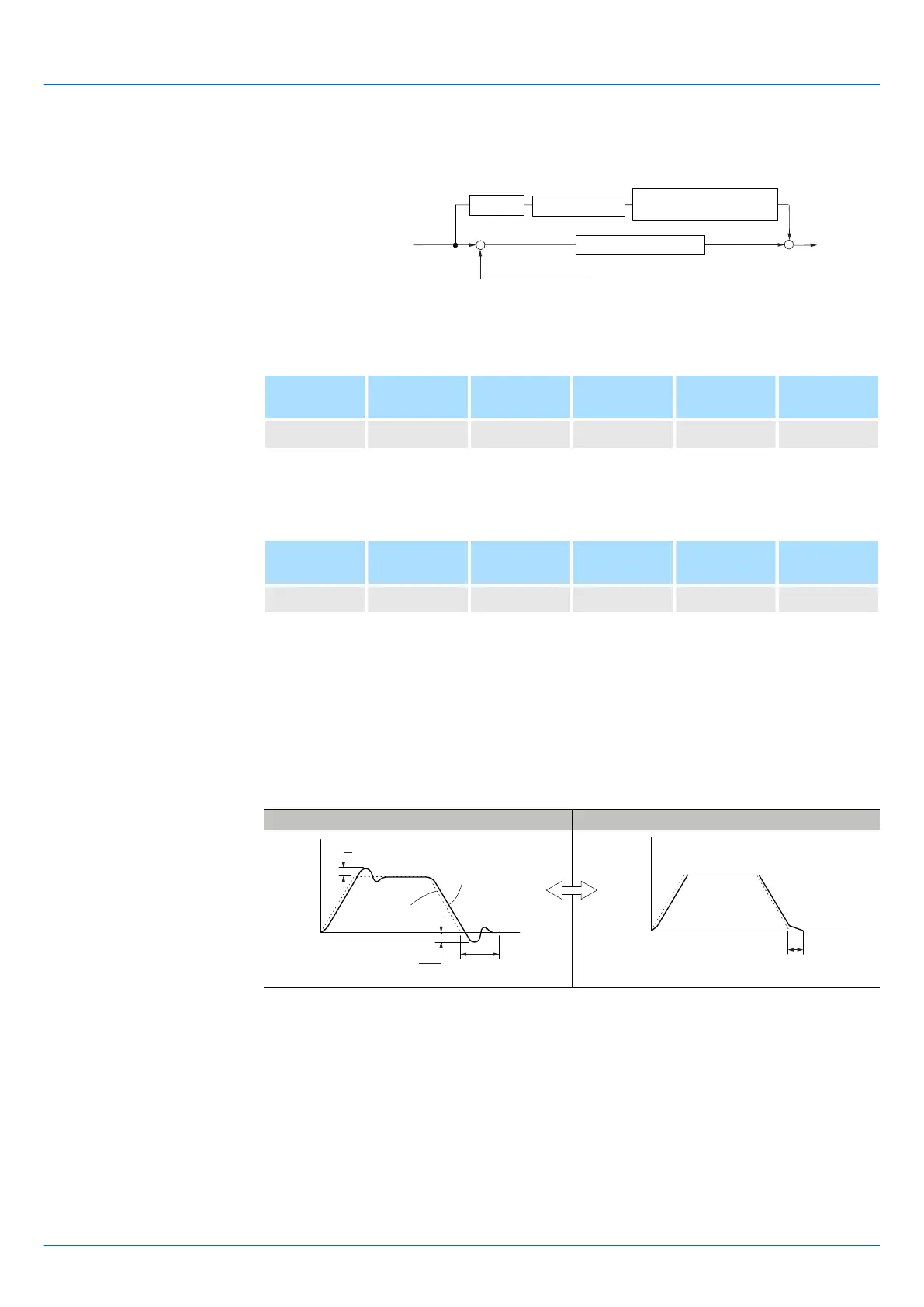
The feedforward function applies feedforward compensation to position control to shorten
the positioning time.
+
+
+
-
Pn109
Pn10A
Position reference pulses
Feedback pulses
Position loop gain (Kp)
Feedforward Filter
Time Constant
FeedforwardDifferential
Fig. 306: Feedforward Function
Feedforward
Setting
Range
Setting Unit Default Set-
ting
When Ena-
bled
Classifica-
tion
Pn109 0 to 100 1% 0 Immediately Tuning
(applies to Position Control)
Feedforward Filter Time Constant
Setting
Range
Setting Unit Default Set-
ting
When Ena-
bled
Classifica-
tion
Pn10A 0 to 6,400 0.01 ms 0 Immediately Tuning
(applies to Position Control)
Note: If you set the feedforward value too high, the machine may vibrate. As a guideline,
use a setting of 80% or less.
You can use mode switching to automatically change between proportional control and PI
control.
Overshooting caused by acceleration and deceleration can be suppressed and the set-
tling time can be reduced by setting the switching condition and switching levels.
Without Mode Switching With Mode Switching
Motor
speed
Overshooting
Actual Servomotor
operation
Reference
Time
Settling time
Overshooting
Motor
speed
Settling time
Time
Fig. 307: Mode Switching
n Related Parameters
Select the switching condition for mode switching with Pn10B = n.X.
Feedforward
Mode Switching
(Changing between Pro-
portional and PI Control)
Sigma-7 Series SERVOPACKs
Tuning
Manual Tuning > Compatible Adjustment Functions
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 420

 Loading...
Loading...







