Number of encoder counts for One user position unit.
Position User Unit = (Numerator / Denominator) [inc].
(Default setting for Position User Unit: 1 [inc])
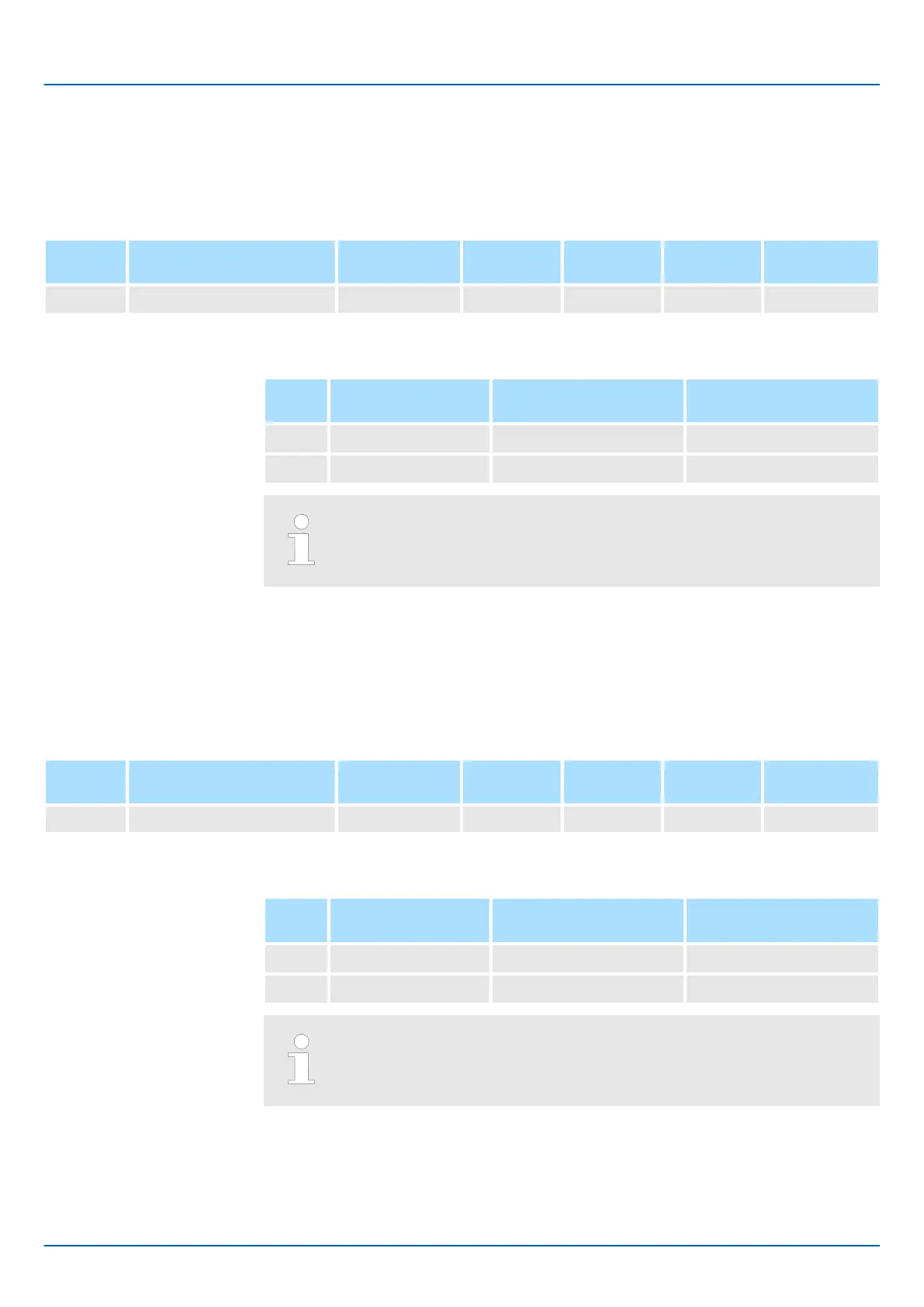
PNU
(hex)
Name Data Type Access PDO Map-
ping
Value Saving to
EEPROM
2301h Position User Unit Array UDINT[2] RW No - Yes
Data Description
Sub-
index
Description Value Range Default Value
0 Numerator
1 £ Value range £ 2
31
-1
1
1 Denominator
1 £ Value range £ 2
31
-1
1
Position user unit ratio must be in the range of 1/4096 to 65536 for suc-
cessful user unit group enable.
Refer to
Ä
Chap. 6.15.2 ‘Setting the Position Reference Unit’ page 178
Number of encoder counts per msec for One user velocity unit.
Velocity User Unit = (Numerator / Denominator) [inc/ms].
(Default setting for Velocity User Unit: 1 [inc/ms])
PNU
(hex)
Name Data Type Access PDO Map-
ping
Value Saving to
EEPROM
2302h Velocity User Unit Array UDINT[2] RW No - Yes
Data Description
Sub-
index
Description Value Range Default Value
0 Numerator
1 £ Value range £ 2
31
-1
1
1 Denominator
1 £ Value range £ 2
31
-1
1
Velocity user unit ratio is only accepted, if max. motor speed will be in the
range of 0 to 2
31
with new velocity user units.
Refer to
Ä
Chap. 6.15.3 ‘Setting the Speed Reference Unit’ page 185
Position User Unit
Velocity User Unit
Sigma-7 Series SERVOPACKs
Object Dictionary
Manufacturer Specific Objects
| | PROFINET Communications - SIEP YEUOC7P 02A Revision 0 | en | 540

 Loading...
Loading...







