NoteAction
If the robot is equipped with DressPack, unscrew
the attachment screws of the brackets that holds
the ball joint housings on the wrist.
11
Then move the DressPack cable package over to
the other side of where the lifting accessory will
be attached to the shackle on the arm house.
12
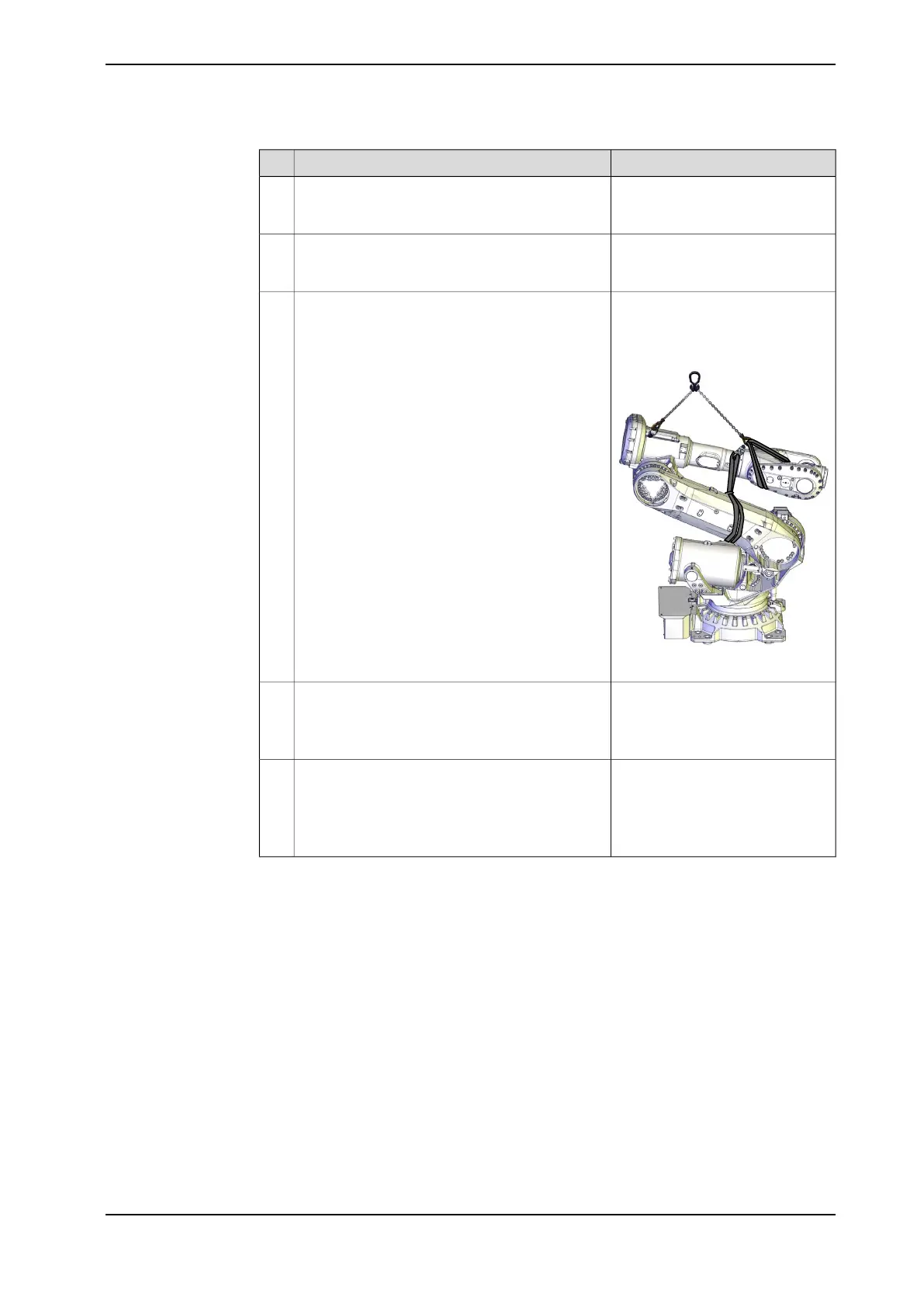
Lifting accessory (chain):
3HAC15556-1
Attach the upper arm lifting accessory to an
overhead crane (or similar), then to the lifting eye
in the arm house and to a roundsling run through
the wrist.
13
Roundsling, 1 m: Length: 1 m. Lift-
ing capacity: 1,000 kg.
xx1200001254
Raise the overhead crane to stretch the chains
and roundslings.
14
Verifiy that the roundsling between the wrist and
the lower arm is stretched.
To release the brake, connect the 24 VDC power
supply.
15
Connect to connector R2.MP2, axis-2 motor:
• + = pin 2
• - = pin 5
3HAC044266-001 Revision: - 187
© Copyright 2013 ABB. All rights reserved.
4 Repair
4.3.2 Lower and upper arm unseparated
Continued
 Loading...
Loading...







