NoteAction
Note
Make sure the lift is done completely level!
In case of necessary adjustments, use the
shortening loops on the lifting accessory
(chain), but make sure to place the chain
the right way through the loops!
4
xx1300001610
Remove the remaining attachment screw
and slide the upper arm on to the guide
pins.
5
CAUTION
If the cable harness is still fitted or partly
fitted, use extreme caution when lifting the
upper arm over to the other side of the ro-
bot, in order not to cause any damage to
the cable harness.
Use caution and lift the upper arm and
place it on the pallets.
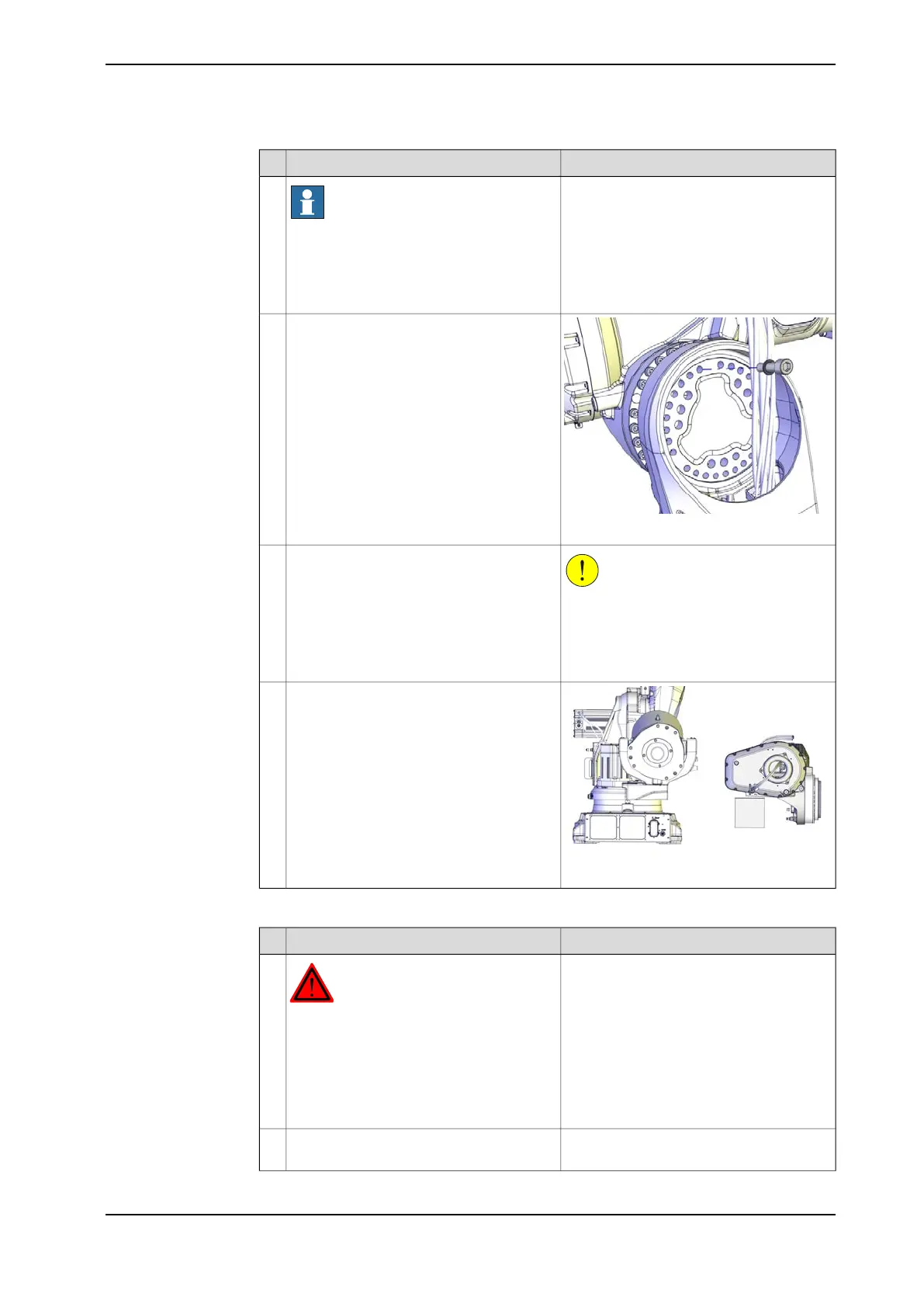
6
xx1300000553
Place a piece of wood (or similar) under
the arm house and lower the upper arm.
Let the upper arm rest as shown in the fig-
ure.
This is done in order to keep the axis-3
gearbox in a vertical position and to get the
best position to replace the gearbox.
7
Removing the lower arm
NoteAction
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot
working area.
1
Attach the lifting accessory to the lower
arm.
2
Continues on next page
3HAC044266-001 Revision: - 315
© Copyright 2013 ABB. All rights reserved.
4 Repair
4.5.4 Replacing the lower arm
Continued