NoteAction
xx1300000659
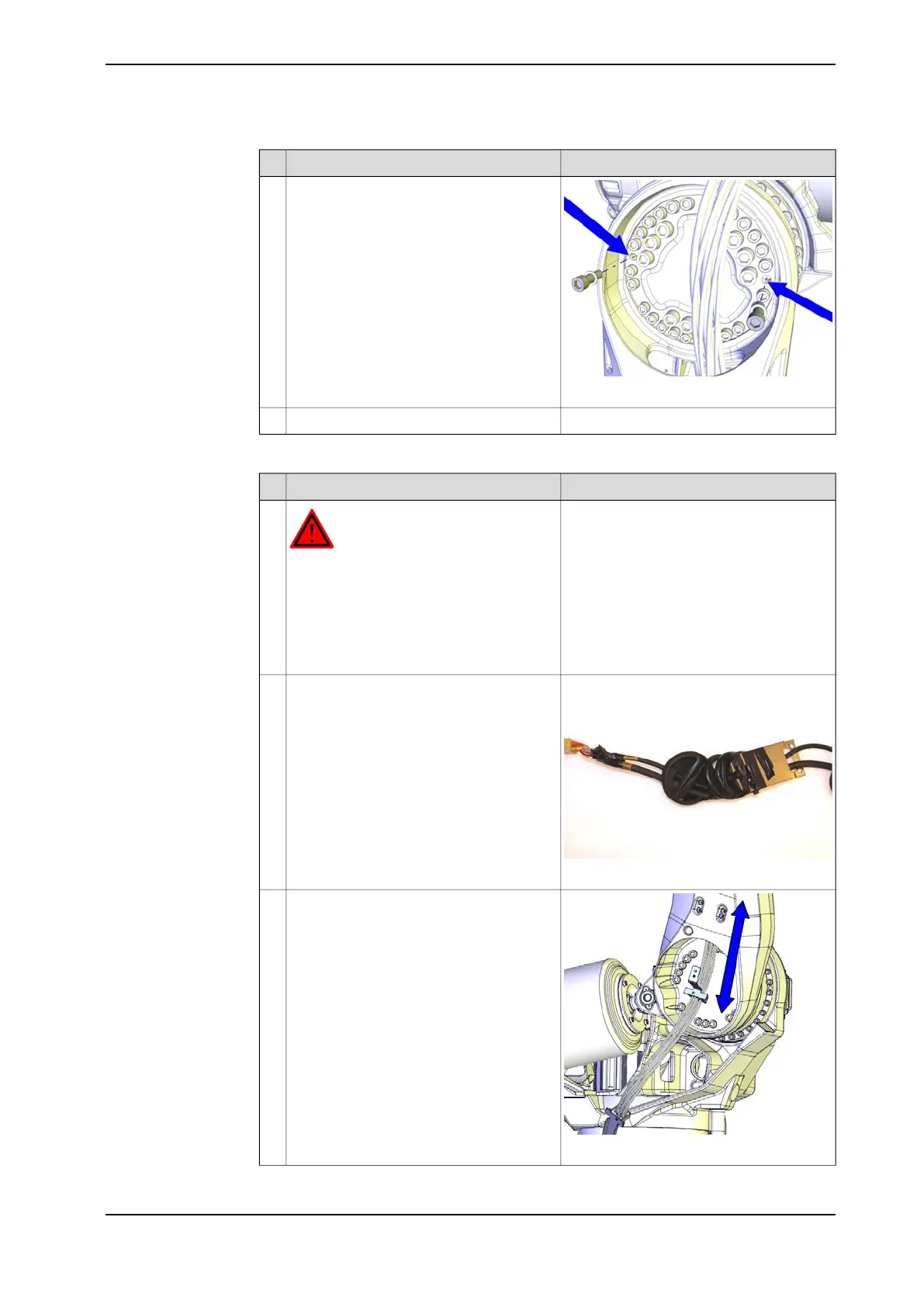
Remove the guide pins and fit the two re-
maining M12 screws.
10
M12, tightening torque: 115 NmSecure the remaining two M12 screws.11
Refitting the cable harness - lower arm
NoteAction
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot
working area.
1
xx1300000668
Tie the axis-5 and axis-6 motor cables into
bundles (if not already done), to avoid
damaging them during the continued pro-
cedure. This will also make it easier to run
the cables through the inside of the robot.
2
xx1300000733
Run the upper end of the cable harness up
through the lower arm.
3
Continues on next page
3HAC044266-001 Revision: - 321
© Copyright 2013 ABB. All rights reserved.
4 Repair
4.5.4 Replacing the lower arm
Continued