NoteAction
xx1200001189
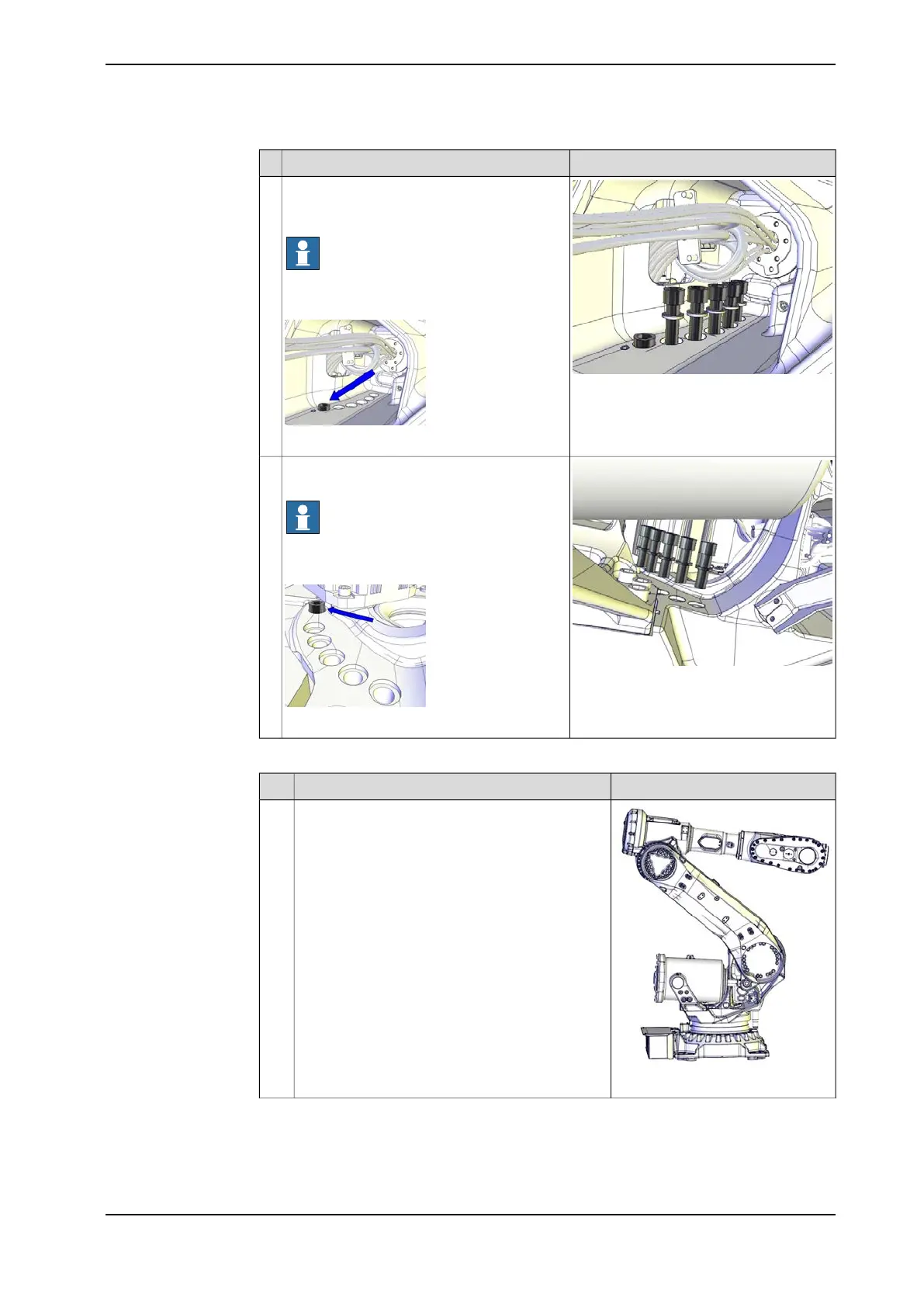
Unscrew five of the six attachment screws
inside the frame hole that secure the frame
to the gearbox.
Note
Leave the outermost screw fitted as a safety
precaution!
xx1200001185
9
xx1200001238
Unscrew five of the six attachment screws
under the balancing device.
Note
Leave the screw closest to the axis-1 motor
fitted.
xx1200001239
10
Robot position
NoteAction
xx1200001132
Jog the robot into position:
• Axis 1: no significance as long as the robot
is secured to the foundation.
• Axis 2: -45°
• Axis 3: +50° to 55° (approximately)
• Axis 4, 5 and 6: calibration position (0°)
1
Continues on next page
3HAC044266-001 Revision: - 453
© Copyright 2013 ABB. All rights reserved.
4 Repair
4.8.1 Replacing the axis-1 gearbox
Continued
 Loading...
Loading...







