NoteAction
Remove the lifting accessory from the bal-
ancing device.
7
Robot position
NoteAction
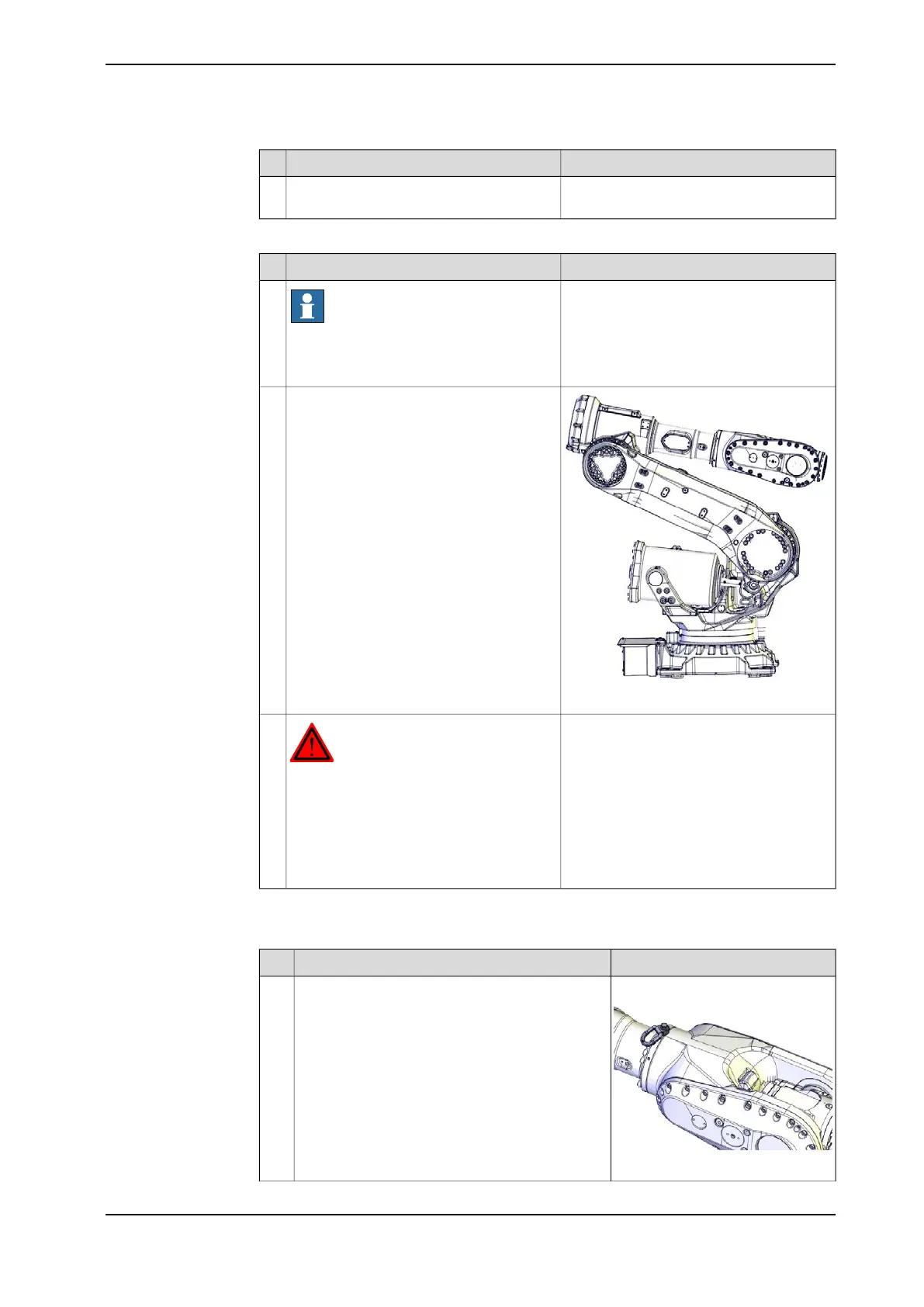
Note
When jogging the axis-2 into position check
that the balancing device ear and the ear
on the lower arm is not colliding!
1
xx1200001250
Jog the robot into position:
• Axis-1: no significance as long as
the robot is secured to the founda-
tion
• Axis-2: -60°
• Axis-3: +70° (approximately)
• Axis-4: 0°
• Axis-5: 0°
• Axis-6: 0°.
2
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot
working area.
3
Attaching the lifting accessories
Use this procedure to attach the lifting accessories.
NoteAction
Lifting eye: 3HAC16131-1
xx1200001133
Fit a lifting eye to the wrist.1
Continues on next page
3HAC044266-001 Revision: - 483
© Copyright 2013 ABB. All rights reserved.
4 Repair
4.8.2 Replacing the axis-2 gearbox
Continued